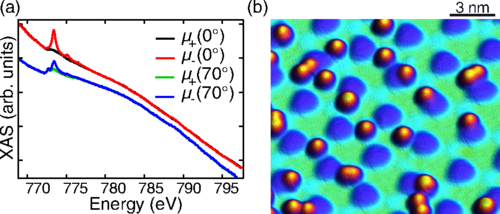
En selektiv aktivering av sidoarmarna på en mjuk robot i ett horisontellt enhetligt magnetfält. Kredit:Sumeet Mishra, North Carolina State University
Forskare från North Carolina State University har utvecklat en teknik för att använda kedjor av magnetiska nanopartiklar för att manipulera elastiska polymerer i tre dimensioner, som skulle kunna användas för att fjärrstyra nya "mjuka robotar".
Förmågan att kontrollera rörelsen hos mjuka robotar, tillsammans med deras flexibilitet, ger dem potentiella tillämpningar som sträcker sig från biomedicinsk teknik till tillverkningsprocesser. Forskare är intresserade av att använda magnetfält för att styra rörelsen hos dessa mjuka robotar eftersom det kan göras på distans – kontrollen kan utövas utan att fysiskt kopplas till polymeren – och eftersom magnetfält lätt erhålls från permanentmagneter och elektromagneter.
Ett team av forskare har nu hittat ett sätt att bädda in långa kedjor av nanoskala magnetitpartiklar i ark av elastisk polymer för att bilda en magnetisk polymer nanokomposit. Genom att applicera ett magnetfält, forskarna kan kontrollera hur nanokompositen böjs - vilket gör den till en mjuk robot.
Processen börjar med att nanopartiklar av magnetit - en järnoxid - sprids till ett lösningsmedel. En polymer löses sedan i blandningen, som hälls i en form för att bilda önskad form. Ett magnetfält appliceras sedan, vilket får magnetitnanopartiklarna att ordna sig i parallella kedjor. Lösningen torkas, låsa kedjorna på plats, och den färdiga nanokompositen kan skäras, för att ytterligare förfina dess form.
"Med den här tekniken, vi kan skapa stora nanokompositer, i många olika former, som kan fjärrmanipuleras, " säger Sumeet Mishra, en Ph.D. student vid NC State och huvudförfattare till en artikel om arbetet. "Nanopartikelkedjorna ger oss ett förbättrat svar, och genom att kontrollera styrkan och riktningen av magnetfältet, du kan kontrollera omfattningen och riktningen av mjuka robotars rörelser."
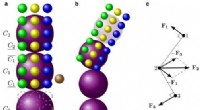
Kedjad magnetisk polymer nanokomposit. Kredit:Sumeet Mishra.
Mekanismen härrör från kedjornas struktur. Forskarna har också konstruerat en enkel modell för att förklara hur de kedjade nanopartiklarna påverkar det mekaniska svaret i magnetfält.
"Nyckeln här är att nanopartiklarna i kedjorna och deras magnetiska dipoler är ordnade topp mot svans, med den positiva änden av en magnetisk nanopartikel i linje med den negativa änden av nästa, hela vägen ner i raden, " säger Joe Tracy, en docent i materialvetenskap och teknik vid NC State och motsvarande författare till uppsatsen. "Det handlar om något som kallas magnetisk anisotropi, som orsakas av att nanopartiklarna sätts samman till kedjor. När ett magnetfält appliceras i någon riktning, kedjan omorienterar sig för att bli så parallell som möjligt med magnetfältet, begränsad endast av tyngdkraftens begränsningar och polymerens elasticitet."
Forskarna tror att denna teknik kan vara särskilt attraktiv för vissa biomedicinska tillämpningar, jämfört med mjuk robotik som förlitar sig på elektricitet eller ljus för kontroll. "Elektrisk kontroll kan ge upphov till säkerhetsproblem för vissa medicinska tillämpningar, " säger Mishra. "Och både elektriska och ljusa signaler utgör utmaningar när det gäller att kommunicera dessa signaler till enheter som är inbäddade i kroppen. Magnetiska fält, å andra sidan, passera lätt - och innebär färre säkerhetsutmaningar."
Denna teknik använder billiga och allmänt tillgängliga material, och processen är relativt enkel och lätt att utföra, säger forskarna.
Pappret, "Selektiv och riktad aktivering av elastomerfilmer med hjälp av kedjade magnetiska nanopartiklar, " publiceras online i tidskriften Royal Society of Chemistry Nanoskala .