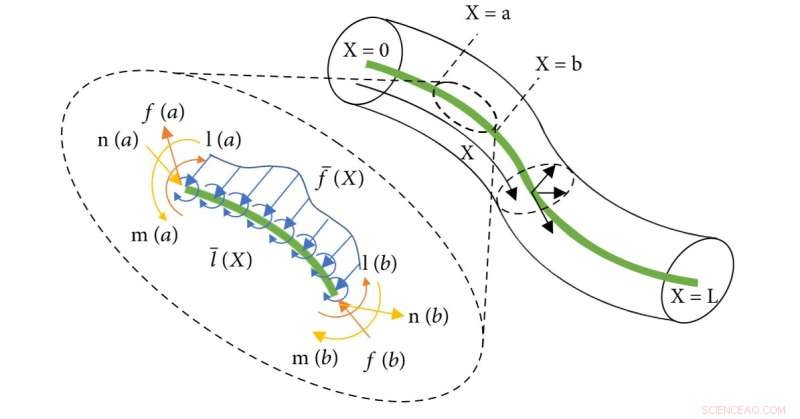
Diagram över kraftanalys av kontinuerliga medier. Kredit:Cyborg and Bionic Systems (2022). DOI:10.34133/2022/9783517
En granskning av forskare vid Zhejiang University sammanfattade utvecklingen av kontinuumrobotar från aspekter av design, aktivering, modellering och kontroll. Det nya granskningsdokumentet, publicerat den 26 juli i tidskriften Cyborg and Bionic Systems , gav en översikt över de klassiska och avancerade teknologierna för kontinuumrobotar, tillsammans med några framtidsutsikter som snabbt måste lösas.
"Vissa småskaliga kontinuumrobotar med nya aktiveringsmetoder undersöks i stor utsträckning inom området interventionell kirurgisk behandling eller endoskopi, men karakteriseringen av mekaniska egenskaper hos dem är fortfarande ett annat problem," förklarade studieförfattaren Haojian Lu, professor vid Zhejiang University.
För att förverkliga miniatyriseringen av kontinuumrobotar har många banbrytande material utvecklats och använts för att realisera manövreringen av robotar, vilket visar unika fördelar. Kontinuumrobotarna inbäddade med mikromagnet eller gjorda av ferromagnetiskt kompositmaterial har noggrann styrförmåga under ett externt kontrollerbart magnetfält; Magnetiskt mjuka kontinuumrobotar kan å andra sidan uppnå små diametrar, upp till mikronskalan, vilket säkerställer deras förmåga att utföra riktad terapi i bronkier eller i hjärnkärl.
Det är dock svårt för magnetiskt mjuka kontinuumrobotar att upprätthålla stabilitet under yttre krafter, och de små stela magnetspetsarna riskerar att falla av inuti kroppen under drift. För att uppnå säkrare och mer tillförlitlig kontroll används formminnesmaterial för att driva kontinuumroboten och för kardiovaskulär undersökning och nasofaryngeal administrering. Den viktigaste fördelen med detta självdeformerande material är att det ger förlängning, böjning och vridning av huvudstammen och kan uppnå övergripande aktivering med bibehållen liten skala, men dess inneboende hysteres gör det svårt att uppnå snabb respons och exakt positionering vid samtidigt, och den har låg lastkapacitet och ganska komplicerad rörledning.
Med tanke på de olinjära deformationer som orsakas av aktivering, materialelasticitet och känslighet för kontakt med omgivningen, står kontinuumrobotar inför stora utmaningar i exakt analytisk modellering.
En av de stora utmaningarna inom modellering är att förenkla modellerna och äventyra förhållandet mellan beräkningskomplexitet och modellnoggrannhet.
På samma sätt är kontrollproblemet också en stor utmaning för kontinuumroboten. Utmaningen är att hitta rätt aktiveringsvärde för att nå önskat tillstånd för att utföra en given uppgift. Modellbaserad styrning är starkt beroende av den exakta modelleringen av kontinuumroboten och sensorernas uppfattningsnoggrannhet. Dessutom används ofta fjärrstyrning för att styra kontinuumroboten inom det medicinska området.
"Forskningsfältet för kontinuumrobotar har gjort stora framsteg, men det finns fortfarande några problem att lösa, inklusive miniatyrisering, mer kraftfull perception och den stabila simuleringsmotorn," sa Lu. + Utforska vidare