Den mångsidiga manipuleringen av droppar över olika skalor har betydande lovande inom olika områden, särskilt inom precisionskemi och biomedicinsk diagnostik. Ur praktisk synvinkel kräver effektiva droppmanipuleringstekniker multifunktionell integration och tillämpbarhet över olika skalor.
Magnetisk excitation har fått en utbredd användning inom droppmanipulation på grund av dess fördelar, såsom fjärrstyrbarhet, biokompatibilitet, okänslighet för miljöfaktorer som substratladdning och utmärkt transparens. Att utöka kapaciteten för magnetiskt känslig droppmanipulation och utöka de olika funktionerna från mikroliter- till nanoliterskalor förblir dock stora utmaningar.
Som svar på denna utmaning utvecklade professor Hu Yanlei och hans forskargrupp från Micro/Nano Engineering Laboratory vid University of Science and Technology of China (USTC) vid den kinesiska vetenskapsakademin (CAS), i samarbete med andra forskare, en magnetiskt manövrerad Janus origami-robot med femtosekundlaser-nanotillverkningsteknik.
Den här roboten möjliggör effektiv integrering av olika dropphanteringsfunktioner, inklusive tredimensionell dropptransport, sammanslagning, delning, exakt dispensering och frigöring på begäran av dotterdroppar, såväl som omrörning och fjärrvärmning.
Dessutom uppvisar denna manipuleringsstrategi anmärkningsvärd stabilitet och möjliggör manipulering av droppar som spänner över volymer från cirka 3,2 nanoliter till cirka 51,14 mikroliter. Resultaten av denna forskning, med titeln "Magnetic Janus origami robot for cross-scale droplet omni-manipulation," har publicerats i Nature Communications .
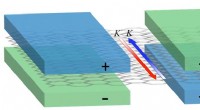
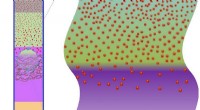
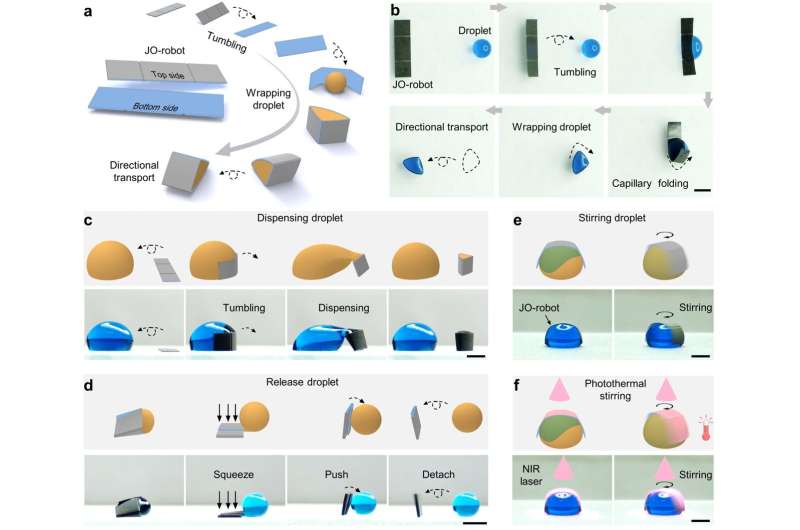
De övre och nedre ytorna på den magnetiskt känsliga Janus origamiroboten med två lager uppvisar distinkta vätningsegenskaper. Robotens övre yta är i ett superhydrofobt tillstånd med låg droppvidhäftning, medan den nedre ytan är hydrofob med hög droppvidhäftning.
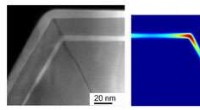
Samtidigt är två veck utformade på robotens övre yta för att underlätta spontant omslutande av droppar under kapillärkrafter vid kontakt. Robotens övergripande profil, veck och ytmikro/nanofunktionella strukturer tillverkas och modifieras genom femtosekundlaserskanning.
Drivs av ett magnetfält närmar sig roboten aktivt och kapslar in vattendroppar genom att rulla, vilket möjliggör kontrollerad dropptransport. Dessutom kan den magnetiskt känsliga Janus origami-roboten med två lager fördela dotterdroppar från större droppar genom riktad rullning och vikning.
Genom att kontrollera magnetfältets styrka kan de fördelade dotterdropparna extruderas från roboten. Med hjälp av sin specialdesignade superhydrofoba exteriör trycker roboten försiktigt på droppar för kontrollerad frigöring och separation. Roboten kan också rotera under påverkan av magnetfältet, uppnå kontrollerad vätskeblandning och, i kombination med dess fototermiska egenskaper, möjliggöra fjärrvärmning.
Magnetiskt känsliga Janus origami-robotar har utvecklats för att möjliggöra mångsidig manipulering av droppar i korsskala, med funktioner som liknar kommersiella magnetomrörare. Utöver snabb blandning av vatten uppvisar dessa robotar förmågan att effektivt blanda högviskösa vätskor som glycerol genom deras uppvärmnings- och omrörningsfunktioner och uppnå temperaturer som överstiger 80°C.
De magnetiskt känsliga Janus origami-robotarna bygger på deras olika dropphanteringsfunktioner och integrerar sömlöst olika dropphanteringsfunktioner för att uppnå kontinuerliga droppmanipulationsmål. Till exempel närmar robotarna autonomt vattendroppar genom rullande rörelser, dispenserar specifika volymer av dotterdroppar, transporterar dessa dispenserade dotterdroppar för att smälta samman med andra droppar och underlättar slutligen snabb blandning av droppar med olika komponenter genom omrörning. Denna multifunktionella droppmanipuleringsintegrering sträcker sig sömlöst till nanoliterskalan.
I en proof-of-concept-demonstration genomförde robotarna, efter ytmodifieringar, framgångsrikt extraktion och rening av nukleinsyror.
Sammanfattningsvis möjliggör magnetiskt känsliga Janus origami-robotar manipulation av droppar i korsskala, vilket har betydande implikationer för exakt reagensleverans, mikrodroppmönster och snabba mikrodroppreaktioner inom olika områden som finkemiteknik, medicinsk diagnostik och mikrofluidikteknik.
Mer information: Shaojun Jiang et al, Magnetic Janus origami-robot för omnimanipulation av droppar i flera skalor, Nature Communications (2023). DOI:10.1038/s41467-023-41092-1
Journalinformation: Nature Communications
Tillhandahålls av University of Science and Technology i Kina