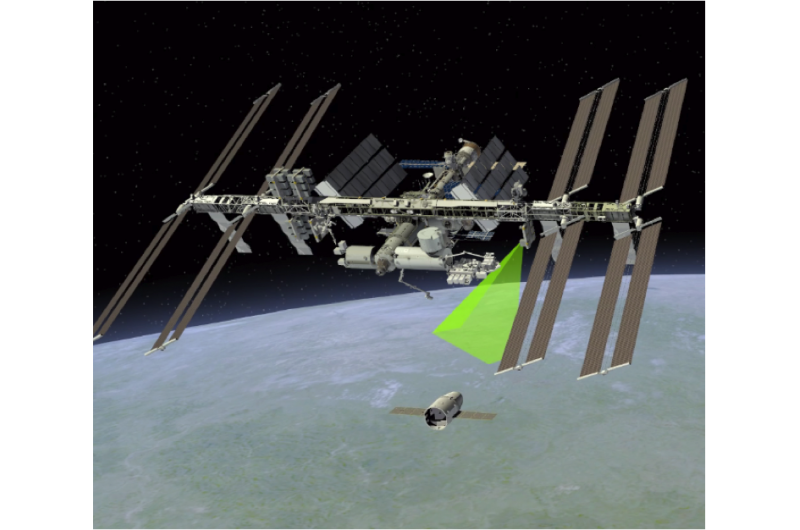
En konstnärs representation av Raven som spårar ett fordon som närmar sig den internationella rymdstationen. Kredit:NASA:s Goddard Space Flight Center
Lanseras snart, ombord på det tionde SpaceX kommersiella återförsörjningsuppdraget, kommer att vara en teknikmodul som heter Raven, vilket kommer att föra NASA ett steg närmare att ha en relativ navigeringsförmåga. När den är anbringad utanför den internationella rymdstationen, Raven kommer att testa grundläggande teknologier som möjliggör autonoma möten i rymden, vilket betyder att de inte kommer att kräva något mänskligt engagemang – inte ens från marken.
För att föreställa sig varför autonoma rendezvous är viktigt i rymduppdrag, föreställ dig detta scenario:en rymdfarkost följer en annan satellit, stadigt minska gapet – med varje fordon som reser mer än 16, 000 miles per timme i rymdens mörker. Satelliten som servas, Klienten, är ett flertonsfarkost som håller på att ta slut på bränsle. Den helt robotiserade servicesatelliten, servicemannen, som heter Restore-L följer i jakten, bär livsförlängande drivmedel och verktyg.
Klienten, inte konstruerad för service, har inga markeringar som gör det lättare för servicepersonalen att hitta och säkra den. Servicepersonalen måste göra detta på egen hand, använder ett avancerat maskinseendesystem, fulländas med hjälp av data som samlats in av Raven ombord på rymdstationen. Framgångsrik service beror först på serviceoperatörens förmåga att exakt lokalisera och matcha hastigheten med klientsatelliten.
För att ytterligare komplicera detta scenario, servicemannen är långt från jorden, skapa en kommunikationsfördröjning för kommando- och datautbyte till och från rymden. Fördröjningen hindrar markoperatörer från att snabbt och exakt ge kommandon till servicepersonalen för att förhindra en eventuell kollision inom de sista foten av mötet.
Därför, tjänsteleverantören måste utföra relativ navigering med sin klient, och det måste göra det självständigt (av sig själv, utan mänsklig vägledning), och i realtid.
"Två rymdfarkoster som möter varandra autonomt är avgörande för många framtida NASA-uppdrag och Raven mognar denna aldrig tidigare försökte teknik, sa Ben Reed, biträdande divisionsdirektör, för Satellite Servicing Projects Division (SSPD) vid NASA:s Goddard Space Flight Center i Greenbelt, Maryland – kontoret som utvecklar och hanterar detta demonstrationsuppdrag.
Raven kommer att demonstrera förmågan hos ett banbrytande relativ navigationssystem, inrymt inom ramen för sin handbagagestorlek, vilket gör att en rymdskeppsserver kan hitta, och om nödvändigt, fånga sitt avsedda mål. Raven har som mål att leda till ett fullt utvecklat, moget system tillgängligt för framtida NASA-uppdrag.

Raven teknologimodul, förlansering. Kredit:NASA:s Goddard Space Flight Center/Chris Gunn
Fem dagar efter lanseringen, Raven kommer att tas bort från den trycklösa "stammen" på rymdfarkosten SpaceX Dragon av Dextre-robotarmen, och fäst på en lastplattform utanför rymdstationen. Från denna abborre, Raven kommer att börja tillhandahålla information för utvecklingen av ett moget realtids-navigeringssystem.
Under sin vistelse ombord på rymdstationen, Ravens komponenter kommer att gå samman för att självständigt avbilda och spåra inkommande och utgående besökande rymdstationer. Att göra detta, Ravens sensorer kommer att mata data som de "ser" till en processor, som kommer att köra uppsättningar instruktioner (även kända som speciella poseringsalgoritmer) för att mäta det relativa avståndet mellan Raven och rymdfarkosten den spårar. Sedan, baserat på dessa beräkningar, processorn kommer självständigt att skicka kommandon som vrider Raven-modulen på sin kardan, eller peksystem, för att hålla sensorerna tränade på fordonet, medan du fortsätter att spåra den. Medan dessa manövrar äger rum, NASA-operatörer på marken kommer att utvärdera hur Ravens teknologier fungerar tillsammans som ett system, and will make adjustments to increase Raven's tracking performance.
Over its two-year lifespan, Raven will test these critical technologies that are expected to support future NASA missions for decades to come. One upcoming application for this technology is its use in the Restore-L servicing mission which will navigate to refuel Landsat 7, a U.S. government Earth-observing satellite already in orbit. An additional application is the potential use for systems on NASA's Journey to Mars. Raven is on track to advance and mature the sensors, machine vision algorithms, and processing necessary to implement a robust autonomous rendezvous and docking system for NASA. SSPD is developing and managing both the Raven and Restore-L demonstration missions.