Mars 2020:s Perseverance rover är utrustad med ett lander vision system baserat på terrängrelativ navigering, en avancerad metod för att autonomt jämföra realtidsbilder med förladdade kartor som bestämmer roverns position i förhållande till faror i landningsområdet. Avleda vägledningsalgoritmer och programvara kan sedan styra rovern runt dessa hinder om det behövs. Kredit:NASA/JPL-Caltech
Efter en nästan sju månader lång resa till Mars, NASA:s Perseverance-rover är planerad att landa vid den röda planetens Jezero-krater den 18 februari, 2021, en oländig vidd utvald för sina vetenskapliga undersökningar och provinsamlingsmöjligheter.
Men just de funktioner som gör platsen fascinerande för forskare gör det också till en relativt farlig plats att landa på – en utmaning som har motiverat rigorösa tester här på jorden för lander vision-systemet (LVS) som rovern kommer att räkna med för att säkert landa.
"Jezero är 28 miles bred, men inom den vidden finns det många potentiella faror som rover kan stöta på:kullar, stenfält, sanddyner, själva kraterns väggar, för att nämna några stycken, sa Andrew Johnson, huvudingenjör för robotteknik vid NASA:s Jet Propulsion Laboratory i södra Kalifornien. "Så, om du landar på en av dessa faror, det kan vara katastrofalt för hela uppdraget."
Gå in i terrängrelativ navigering (TRN), den uppdragskritiska tekniken i hjärtat av LVS som tar bilder av Mars terräng i realtid och jämför dem med ombord kartor över landningsområdet, självständigt dirigera rovern att avleda runt kända faror och hinder efter behov.
"För Mars 2020, LVS kommer att använda positionsinformationen för att ta reda på var rovern befinner sig i förhållande till säkra platser mellan dessa faror. Och på en av de säkra platserna är det där rovern kommer att landa, " förklarade Johnson.
Om Johnson låter säker på att LVS kommer att arbeta för att landa Perseverance säkert, det beror på att det låter rovern bestämma sin position i förhållande till marken med en noggrannhet på cirka 200 fot eller mindre. Den låga felmarginalen och hög grad av säkerhet är designad, och resultatet av omfattande tester både i labbet och på fältet.
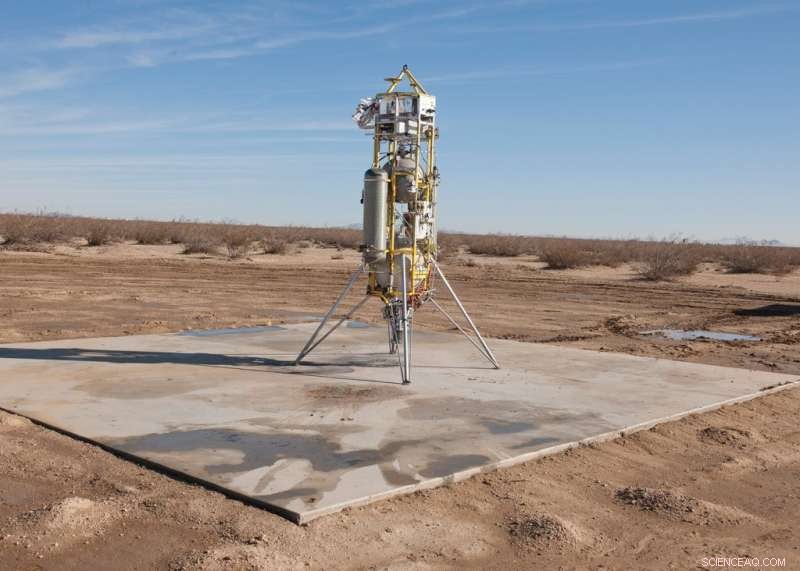
Mastens Xombie VTVL-system sitter på en startplatta i Mojave, Kalifornien i december 2014, förberedd för ett flygtest som skulle hjälpa till att bevisa kapaciteten för landers visionsystem för Mars 2020 Perseverance-roveruppdraget. Kredit:Masten Space Systems
"Vi har vad vi kallar trifecta av testning, " förklarade JPL:s Swati Mohan, vägledning, navigering, och styroperationer leder för Mars 2020.
Mohan sa att de två första testområdena - hårdvara och simulering - gjordes i ett labb.
"Det är där vi testar alla tillstånd och variabel vi kan. Vakuum, vibration, temperatur, elektrisk kompatibilitet – vi sätter hårdvaran igenom dess takt, " sa Mohan. "Då med simulering, vi modellerar olika scenarier som mjukvarualgoritmerna kan stöta på på Mars – en alltför solig dag, mycket mörk dag, blåsig dag – och vi ser till att systemet beter sig som förväntat oavsett dessa förhållanden."
Men den tredje delen av trifectaen – fälttesterna – kräver faktiska flygningar för att sätta labbresultaten genom ytterligare rigor och ge en hög nivå av teknisk beredskap för NASA-uppdrag. För LVS:s tidiga flygtester, Johnson och team monterade LVS på en helikopter och använde den för att uppskatta fordonets position automatiskt när det flög.
"Det fick oss till en viss nivå av teknisk beredskap eftersom systemet kunde övervaka ett brett område av terräng, men det hade inte samma typ av härkomst som Perseverance kommer att ha, ", sade Johnson. "Det fanns också ett behov av att demonstrera LVS på en raket."
Det behovet tillgodosedes av NASA:s Flight Opportunities-program, som underlättade två 2014-flygningar i Mojaveöknen på Masten Space Systems Xombie – ett system för vertikal start och vertikal landning (VTVL) som fungerar på samma sätt som en landning. Flygtesterna visade LVS förmåga att styra Xombie att självständigt ändra kurs och undvika faror vid nedstigning genom att anta en nyberäknad väg till en säker landningsplats. Tidigare flygningar med Mastens VTVL-system hjälpte också till att validera algoritmer och programvara som används för att beräkna bränsleoptimala banor för planetlandningar.
"Testen på raketen lade i stort sett alla återstående tvivel till vila och svarade jakande på en kritisk fråga för LVS-operationen, " sa JPL:s Nikolas Trawny, en ingenjör för nyttolast och styrsystem som arbetade nära Masten vid 2014 års fälttest. "Det var då vi visste att LVS skulle fungera under den höghastighets vertikala nedstigningen som är typisk för Mars-landningar."
Johnson tillade att suborbitala tester faktiskt ökade den tekniska beredskapsnivån för att få det sista gröna ljuset för acceptans till Mars 2020-uppdraget.
"Testerna som Flight Opportunities är inrättat för att tillhandahålla var verkligen aldrig tidigare skådat inom NASA vid den tiden, ", sa Johnson. "Men det har visat sig vara så värdefullt att det nu förväntas göra dessa typer av flygtester. För LVS, dessa raketflygningar var slutstenen i vår teknikutvecklingssatsning."
Med den teknik som accepteras för Mars 2020, uppdragsteamet började bygga den slutliga versionen av LVS som skulle flyga på Perseverance. Under 2019, en kopia av det systemet flög på ytterligare en helikopterdemonstration i Death Valley, Kalifornien, underlättas av NASAs program för Technology Demonstration Missions. Helikopterflyget gav en sista kontroll av över sex år av flera fälttester.
Men Mohan påpekade att även med dessa framgångsrika demonstrationer, det kommer att finnas mer arbete att göra för att säkerställa en säker landning. Hon kommer att vara vid Mission Control för landningen, övervaka systemets hälsa varje steg på vägen.
"Det verkliga livet kan alltid kasta dig kurviga bollar. Så, vi kommer att övervaka allt under kryssningsfasen, kontrollerar strömmen till kameran, se till att data flyter som förväntat, " Sa Mohan. "Och när vi får den signalen från rovern som säger:"Jag har landat och jag är på stabil mark, "Då kan vi fira."