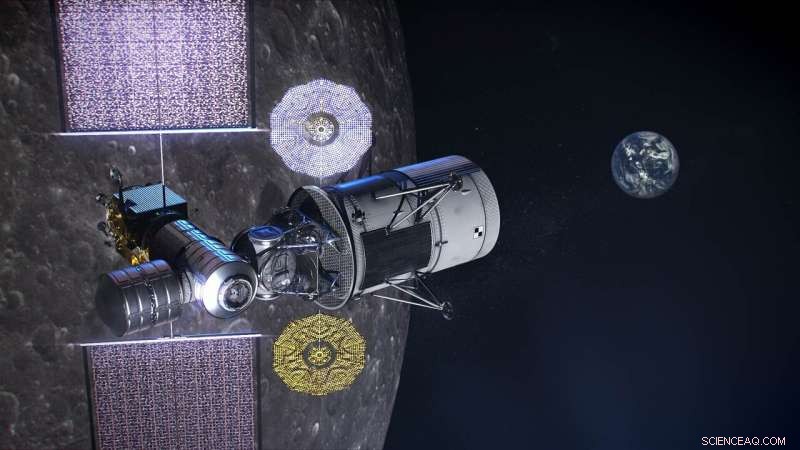
Illustration av NASA:s månkretsande gateway och ett mänskligt landningssystem i omloppsbana runt månen. Kredit: NASA
Rymdkommunikations- och navigeringsingenjörer vid NASA utvärderar navigeringsbehoven för Artemis-programmet, inklusive identifiering av precisionsnavigeringskapaciteten som behövs för att etablera den första ihållande närvaron på månens yta.
"Artemis engagerar oss att tillämpa kreativa navigationslösningar, att välja rätt kombination av förmågor för varje uppdrag, sa Cheryl Gramling, biträdande teknikchef vid Mission Engineering and Systems Analysis Division vid Goddard Space Flight Center i Greenbelt, Maryland. "NASA har en mängd navigationsverktyg till sitt förfogande, och Goddard har ett halvt sekels erfarenhet av att navigera i rymdutforskningsuppdrag i månens omloppsbana."
Förutom beprövade navigeringsmöjligheter, NASA kommer att använda innovativ navigationsteknik under de kommande Artemis-uppdragen.
"Månuppdrag ger möjlighet att testa och förfina nya rymdnavigeringstekniker, sa Ben Ashman, en navigationsingenjör på Goddard. "Månen är en fascinerande plats att utforska och kan fungera som en provningsplats som utökar vår navigeringsverktygslåda för mer avlägsna destinationer som Mars."
I sista hand, utforskningsuppdrag behöver en robust kombination av kapacitet för att tillhandahålla tillgänglighet, elasticitet, och integritet som krävs från ett in-situ navigationssystem. Några av de navigeringstekniker som analyseras för Artemis inkluderar:
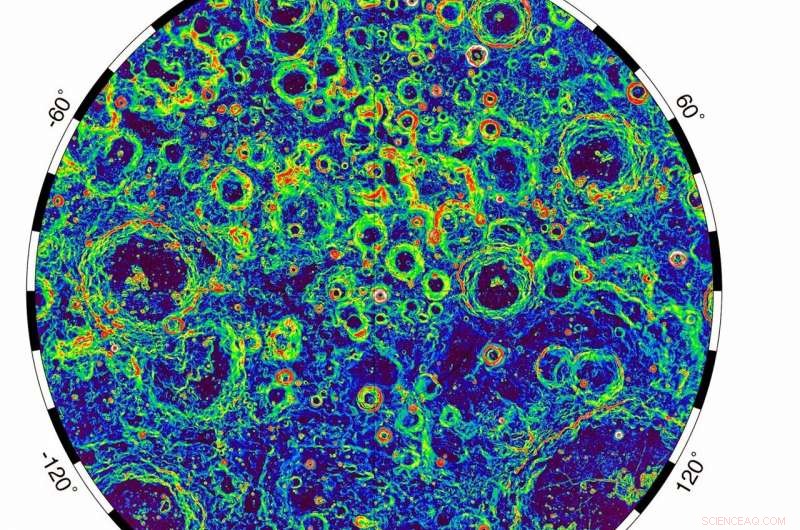
Lunar Orbiter Laser Altimeter (LOLA) ombord på Lunar Reconnaissance Orbiter (LRO) skickar laserpulser ner till månens yta från den kretsande rymdfarkosten. Dessa pulser studsar bort från månen och återgår till LRO, förse forskare med mätningar av avståndet från rymdfarkosten till månens yta. När LRO kretsar runt månen, LOLA mäter formen på månytan, som innehåller information om Månens ythöjder och sluttningar. Den här bilden visar sluttningarna som finns nära månens sydpol. Kredit:NASA/LRO
Radiometri, Optimetrik och laserhöjdmetri
Radiometri, optimetrik, och laserhöjdmätningar av avstånd och hastighet med hjälp av egenskaperna hos elektromagnetiska sändningar. Ingenjörer mäter tiden det tar för en transmission att nå en rymdfarkost och dividerar med transmissionens färdhastighet - ljusets hastighet.
Dessa noggranna mätningar har varit grunden för rymdnavigering sedan uppskjutningen av den första satelliten, ger en noggrann och tillförlitlig mätning av avståndet mellan sändaren och rymdfarkostens mottagare. Samtidigt, förändringshastigheten i rymdfarkostens hastighet mellan sändaren och rymdfarkosten kan observeras på grund av Dopplereffekten.
Radiometri och optimetrik mäter avstånden och hastigheten mellan en rymdfarkost och markantenner eller andra rymdfarkoster med hjälp av deras radiolänkar och infraröda optiska kommunikationslänkar, respektive. Inom laserhöjdmätning och rymdlaseravstånd, ett rymdskepp eller ett markteleskop reflekterar lasrar från ytan på en himlakropp eller en speciellt utsedd reflektor för att bedöma avstånd.

Illustration av Firefly Aerospaces Blue Ghost-landare på månytan. Landaren kommer att bära en svit med 10 vetenskapliga undersökningar och teknikdemonstrationer till månen 2023 som en del av NASA:s initiativ för Commercial Lunar Payload Services (CLPS). Kredit:Firefly Aerospace
Optisk navigering
Optiska navigeringstekniker bygger på bilder från kameror på en rymdfarkost. Det finns tre huvudgrenar av optisk navigering.
Svag-Signal GPS och GNSS
NASA utvecklar funktioner som gör det möjligt för uppdrag på månen att utnyttja signaler från Global Navigation Satellite System (GNSS) konstellationer som U.S.G.S. GPS. Dessa signaler – som redan används på många rymdfarkoster som kretsar runt jorden – kommer att förbättra timingen, förbättra positioneringsnoggrannheten, och assistera autonoma navigationssystem i cislunar- och månrymden.
År 2023, Lunar GNSS Receiver Experiment (LuGRE), utvecklat i samarbete med den italienska rymdorganisationen, kommer att demonstrera och förfina denna förmåga på månens Mare Crisium-bassäng. LuGRE kommer att flyga på ett Commercial Lunar Payload Services-uppdrag levererat av Firefly Aerospace från Cedar Park, Texas. NASA kommer att använda data som samlats in från LuGRE för att förfina månens GNSS-system för framtida uppdrag.

Konstnärens konceptualisering av Artemis-astronauter som använder LunaNet-tjänster på månen. en unik strategi för månkommunikation och navigering. LunaNets kommunikations- och navigeringsarkitektur kommer att möjliggöra den precisionsnavigering som krävs för besättningsuppdrag till månen och placera våra astronauter närmare vetenskapligt betydelsefulla månplatser, förbättra våra uppdrags vetenskapliga resultat. Kredit:NASA/Resse Patillo
Autonom navigering
Autonom navigationsprogramvara utnyttjar mätningar som radiometri, himmelsnavigering, höjdmätare, terrain-relative navigation, and GNSS to perform navigation onboard without contact with operators or assets on Earth, enabling spacecraft to maneuver independently of terrestrial mission controllers. This level of autonomy enables responsiveness to the dynamic space environment.
Autonomous navigation can be particularly useful for deep space exploration, where the communications delay can hamper in-situ navigation. Till exempel, missions at Mars must wait eight to 48 minutes for round trip communications with Earth depending on orbital dynamics. During critical maneuvers, spacecraft need the immediate decision-making that autonomous software can provide.
LunaNet Navigation Services
LunaNet is a unique communications and navigation architecture developed by NASA's Space Communications and Navigation (SCaN) program. LunaNet's common standards, protokoll, and interface requirements will extend internetworking to the moon, offering unprecedented flexibility and access to data.
For navigation, the LunaNet approach offers operational independence and increased precision by combining many of the methods above into a seamless architecture. LunaNet will provide missions with access to key measurements for precision navigation in lunar space.