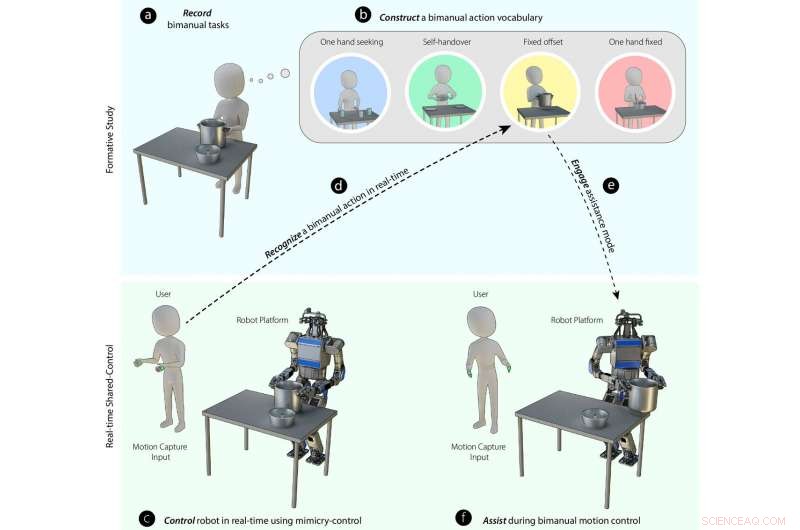
Diagram som illustrerar den experimentella designen för bimanuell robotmanipulation. En "bimanual action vokabulär" för robotar utvecklades från en omfattande analys av mänskliga bimanuella hand- och armrörelser (översta panelen märkt "formativ studie"). En robot programmerad med ett neuralt nätverk och ett bimanuellt handlingsordförråd kopplades till en volontär som försökte styra roboten för att utföra olika bimanuella uppgifter. Roboten fångade människans poser och slutade sig till den korrekta rörelsen genom att dra från dess bimanuella ordförråd. Kredit:Rakita et al., Sci. Robot . 4, eaaw0955 (2019)
Ett team av forskare från University of Wisconsin och Naval Research Laboratory har designat och byggt ett robotsystem som möjliggör bimanuell robotmanipulation genom delad kontroll. I deras papper publicerad i tidskriften Vetenskapsrobotik , gruppen förklarar idéerna bakom deras arbete och hur väl de fungerat i praktiken.
Som forskarna noterar, att använda två händer som arbetar tillsammans för att slutföra en uppgift är mycket komplicerat – det innebär mycket mer än bara två enskilda händer som arbetar oberoende med samma uppgift samtidigt. När en person öppnar en burk, till exempel, hjärnan måste fungera som en sorts medlare, styra handlingen när den tar emot och skickar signaler till båda händerna. Sådana enkla uppgifter är så komplicerade att robotar inte kan utföra dem – det är därför praktiskt taget alla robotar arbetar med bara en hand. I denna nya ansträngning, forskarna har tagit ett litet steg i riktning mot att lära robotar hur man använder två händer för att utföra en uppgift.
Forskarna noterar att många semi-robotapplikationer tillåter robotar att tjäna en förstärkningsroll, istället för att göra något på egen hand. En kirurg som styr en robothand med sin egen hand är ett exempel. Men de noterar också att enkel mimik inte skulle fungera för tvåhandsförstärkta robotsystem - sådana rörelser är för komplexa. Lösningen, de hittade, var att kombinera mimik med ett djupt lärande nätverk. Resultatet blev en teknik som gjorde det möjligt för en robot att utföra bimanuella uppgifter genom att dela kontrollen med en människa.
Arbetet började med att utrusta en robot med två armar och händer. De lade till hårdvara för att låta robotarmarna kommunicera med ett djupinlärningsnätverk och sensorer placerade på en människa. En robot fick veta vilken uppgift som skulle göras, och sedan utförde människan det. När människan gjorde det, roboten gjorde sitt bästa för att efterlikna handlingen samtidigt. Genom att upprepa proceduren många gånger fick roboten lära sig om de många små uppgifterna som var involverade i att utföra huvuduppgiften, vilket ledde till viss intuition från dess sida.
Över tid, som en robot arbetade tillsammans med en människa, den lade till sina egna kommandon för att uppnå ett bättre resultat. Roboten gick inte så långt att den utförde uppgiften på egen hand – istället, den lärde sig att fungera som en mer fullt kapabel utökad assistent. Forskarna noterar att en sådan robot möjligen skulle kunna fungera som assistent för delvis funktionshindrade. Också, Det verkar som om marinen skulle kunna använda en sådan robot för avlägsna undervattensoperationer.
© 2019 Science X Network