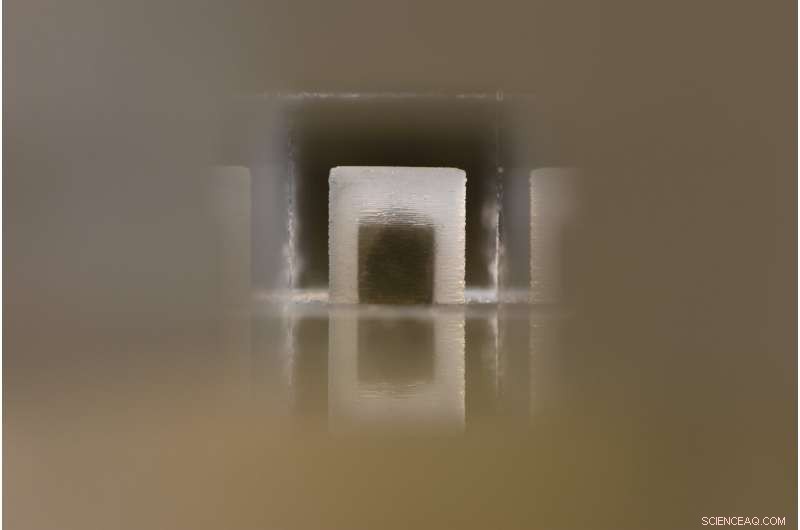
Kupén (ljusområdet) i akrylkanalen som används för experimentell testning. Inuti kupolen finns gallium-indiumplattor av flytande metall (mörkt område). Kredit:U.S. Naval Research Laboratory.
Naturen kan vara en värdefull inspirationskälla för forskare som utvecklar robotar och artificiell intelligens (AI)-system. Studier i dränkbar robotik, till exempel, har ofta försökt replikera eller införliva mekanismer som observerats i vattenlevande liv, såsom fiskrörelsemönster och hajskinnstexturer.
Ett team av forskare vid U.S. Naval Research Laboratory och U.S. Naval Undersea Warfare Center har nyligen utvecklat en kapacitiv flödesavkännande cupula inspirerad av ytliga neuromaster, som i huvudsak är strukturer på fiskens och amfibiernas kropp som kan detektera vattenflödet. Denna kuppel, presenterad i ett papper publicerat i MDPI, uppvisar en hög känslighet på 0,05 picofarad per millimeter (pF/mm) och kan appliceras på en mängd olika robotar och fordon utformade för att användas under vattnet.
"U.S. Naval Research Laboratory, tillsammans med många andra institutioner, utforskar naturinspirerade sätt att uppnå ökad effektivitet och manövrerbarhet i undervattensrobotar, "Charles Rohde, en av forskarna som genomförde studien, berättade TechXplore. "I huvudsak, Att skapa en konstgjord fisk ger många fördelar jämfört med traditionella propellerdrivna konstruktioner. Om vi tittar på biologiska motsvarigheter, fastän, vi ser att deras framgång beror på mer än bara mekaniken och kroppens rörelse; fiskar har en rad sensorer längs sina kroppar."
Fiskar har en serie så kallade sidolinjesensorer som ger återkoppling av flödesförhållanden, så att de kan orientera sig under vattnet och upptäcka närliggande föremål. Rohde och hans kollegor ville replikera dessa sensorer och efterlikna deras egenskaper för att förbättra prestanda för undervattensfordon.
De biologiska kuplarna som observeras hos fisk består av gel inbäddad med sensorhår, som är fästa till vattendjurets hjärna via en serie nerver. Den konstgjorda kupan utvecklad av forskarna, å andra sidan, består av silikongummi inbäddat med flytande metallavkänningsplattor, som är anslutna till en mikrokontroller med hjälp av kablar.
En ytterligare skillnad mellan naturligt förekommande cupulas och den konstgjorda som utvecklats av forskarna är att medan den förra använder elektrokemiska signaler, den senare är kapacitiv (dvs. som smartphones pekskärmar, det förlitar sig på förändringar i elektriska fält). I motsats till pekskärmar, den bioinspirerade enheten interagerar inte med yttre föremål (t.ex. mänskliga fingrar). Istället, den består av flytande metallplattor som rör sig och deformeras i förhållande till varandra.
"De flytande metallplattorna (gallium-indium) bildar två kapacitiva sensorer som deformeras baserat på krafter som tillförs silikonskålen genom vätskeflöde, "James Wissman, en annan forskare som är involverad i studien, förklarade. "När kupolen deformeras, de flytande metallplattorna inuti rör sig närmare eller längre från varandra, ändrar kapacitansen mellan dem. En mikrokontroller registrerar denna förändring i kapacitans, som kan relateras till den yttre vätskeflödeshastigheten genom experiment och matematisk modellering."
De kapacitiva sensorerna som forskarna tagit fram har hög känslighet och kan även arrangeras i arrayer. Till exempel, dussintals av dessa sensorer kan placeras över en undervattensrobot i en lateral linje, för att fånga upp och spåra vattenflödesegenskaper. Dessa avkännande cupulas är mjuka; sålunda kan de integreras med konstgjorda hudmaterial utan att lägga till styvhet till bioinspirerade maskiner.

Cupula prov visar dess flexibilitet. Kredit:U.S. Naval Research Laboratory.
"Det finns flera andra cupula- och hårbaserade flödessensorer publicerade i litteraturen, men vi blev förvånade över att bara hitta en annan under vattnet, seal whisker-inspirerade exempel som var kapacitiv till sin natur, " Sa Rohde. "Våra resultat visar att kapacitiv avkänning är ett mycket lovande tillvägagångssätt, och vi hoppas att vår publikation kommer att uppmuntra andra att utforska denna metod. "
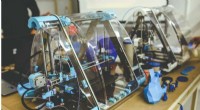
Rohde, Wissman och deras kollegor tillverkade sin bioinspirerade sensor med hjälp av tappat vax och vakuuminjektionstekniker. De genomförde sedan en serie preliminära tester för att utvärdera dess prestanda.
Jämfört med andra kapacitiva enheter, deras sensor införlivar givare i själva cupulan, snarare än vid dess bas. I sina utvärderingar, denna speciella aspekt av sensorns tillverkning visade sig vara mycket effektiv, vilket leder till mer avancerade avkänningsmöjligheter än de som observerats i tidigare utvecklade kapacitiva enheter.
"Bortsett från själva sensorn, en annan viktig aspekt är tillverkningsprocessen, "Sa Wissman." För att skapa en så komplex struktur inuti en liten silikonstruktur, vi använde en unik kombination av offergjutning (tänk gjutning av förlorad vax) och vakuuminjektion av flytande metall. Detta kan lätt utökas till andra enheter, såsom komplexa 3D-ledningar eller antenner."
Avkänningsenheten utvecklad av Rohde, Wissman och hans kollegor kan ha en mängd olika tillämpningar inom området dränkbar robotik, eftersom det möjliggör utvecklingen av robotar som kan navigera i undervattensmiljöer mer effektivt. I deras framtida arbete, forskarna planerar att miniatyrisera sin enhet, som för närvarande är 5 mm hög; 50 gånger större än neuromaster som observerats hos fisk.
En mindre version av sensorn kan möjliggöra en mer direkt mätning av flödesförhållanden för gränsskikt, ännu närmare en robots vattenvända yta. För att miniatyrisera sensorn, dock, forskarna kommer att behöva ändra sina tillverkningsmetoder.
Än så länge, Wissman och hans kollegor har främst fokuserat på stadiga (eller långsamt föränderliga) vattenflöden, men supersnabba flödesvariationer (dvs> 1, 000-10, 000 gånger per sekund) i samband med turbulens och virvlar skulle kunna ge djupare insikter om en robots omgivande miljö. I sina kommande studier, forskarna skulle därför vilja bredda sitt arbete genom att inkludera dessa flödesvariationer och titta på snabbare datainsamlingstekniker.
"Vi planerar också att sätta ihop en rad konstgjorda kupoler - en konstgjord sidolinje - som kan fästas på en nedsänkbar robot, ", sa Wissman. "Kulminationen av detta projekt skulle vara att titta på en autonom robotfisk, med hjälp av våra inbyggda sensorer, framgångsrikt navigera i en pool med hinder och strömmar."
© 2019 Science X Network