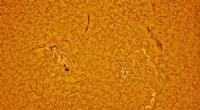
En synvinkel på "Vera Rubin Ridge" gav NASA:s Curiosity Mars rover denna detaljerade blick tillbaka över området där den började sitt uppdrag inne i Gale Crater, plus mer avlägsna funktioner i kratern. Höger öga, teleobjektiv av roverns Mastcam tog komponentbilderna 25 oktober, 2017. Kredit:NASA/JPL-Caltech/MSSS
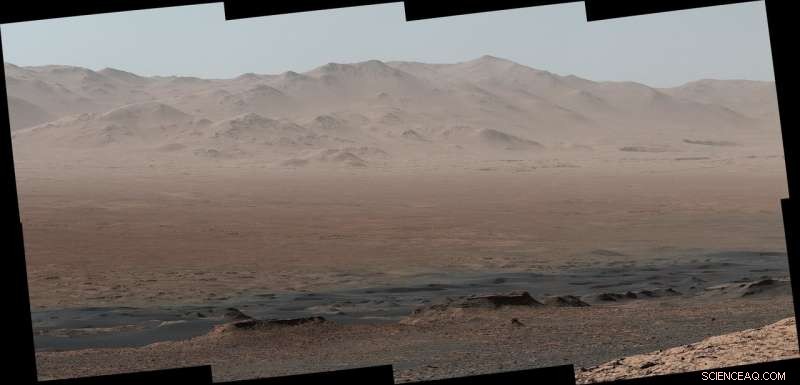
En panoramabild som NASA:s Curiosity Mars -rover tog från en bergsrygg ger en svepande utsikt över viktiga platser som besökts sedan roverens landning 2012, och de höga omgivningarna.
Utsikten från "Vera Rubin Ridge" på norra flanken av Mount Sharp omfattar mycket av den 18 mil långa vägen som rovern har kört från sin landningsplats 2012, allt inuti Gale Crater. En kulle vid den norra horisonten är cirka 85 mil bort, väl utanför kratern, även om det mesta av scenens horisont är kraterns norra kant, ungefär en tredjedel så långt bort och 2 kilometer över rovern.
Curiosity's Mast Camera, eller Mastcam, tog komponentbilderna av panoraman för tre månader sedan medan rovern pausade på norra kanten av Vera Rubin Ridge. Uppdraget har därefter närmat sig den södra kanten av åsen och undersökt flera utgrävningsplatser längs vägen.
Förra veckan, Nyfikenhetsteamet på jorden fick många nya bilder från rovern genom ett rekordinställningsrelä av NASAs MAVEN-orbiter-som översteg en gigabit data under en enda reläsession från Mars för första gången i historien.
Teamet förbereder sig för att återuppta användningen av Curiositys borr för att förvärva pulverformiga bergprover som ska analyseras med laboratorieinstrument inuti rovern, mer än ett år efter den senaste av de 15 gånger som borren har tagit provmaterial från Mars -stenar.

Klättring "Vera Rubin Ridge" gav NASAs Curiosity Mars rover denna utsikt över interiören och kanten av Gale Crater, inklusive mycket av roverens rutt sedan landningen 2012 och har upp till cirka 50 mil bort. Den vänstra ögonkameran på roverns Mastcam tog komponentbilderna 25 oktober, 2017. Kredit:NASA/JPL-Caltech/MSSS
Inuti en slagkrater
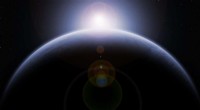
Mount Sharp står mitt i Gale Crater, som är 154 kilometer i diameter.
"Även om Nyfikenhet har stigit stadigt i fem år, detta är första gången vi kunde se tillbaka och se hela uppdraget som ligger under oss, "sa Curiosity Project Scientist Ashwin Vasavada från NASAs Jet Propulsion Laboratory, Pasadena, Kalifornien. "Från vår abborre på Vera Rubin Ridge, kratergolvets vida sträckor sträcker sig ut till den spektakulära bergskedjan som bildar norra kanten av Gale -kratern. "Rovern fotograferade scenen strax före norra Mars vintersolstånd, en säsong med klar himmel, får en skarp bild av avlägsna detaljer.
Curiositys exakta landningsplats på golvet i kratern ligger utom synhåll bakom en liten stigning, men scenen inkluderar "Yellowknife Bay." Det är där, under 2013, uppdraget fann bevis på en gammal sötvatten-sjö miljö som erbjöd alla de grundläggande kemiska ingredienserna för mikrobiellt liv. Längre norrut är kanalen och fan av Peace Vallis, reliker från bäckarna som transporterade vatten och sediment till kratern för ungefär tre miljarder år sedan.
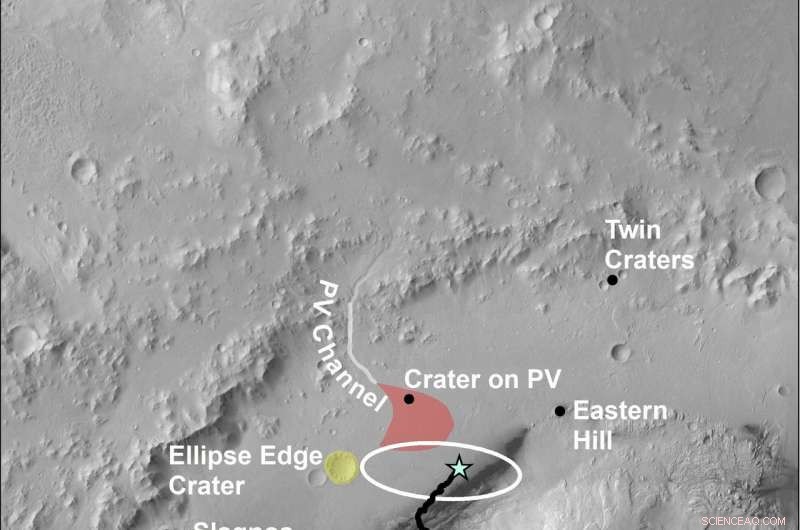
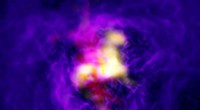
Denna bild av den nordvästra delen av Mars 'Gale -krater och terräng norr om den, från European Space Agency:s Mars Express -orbiter, ger en lokaliseringskarta för några funktioner som syns i ett panorama från oktober 2017 från NASA:s Curiosity Mars -rover. Upphovsman:ESA/DLR/FU Berlin/NASA/JPL-Caltech
Webbplatser som "Kimberley" och "Murray Buttes" längs roverns rutt är markerade på en kommenterad postering av panorama. Mastcam spelade in både en bredare version av scenen (från sydväst till nordost) med vänster öga, 34-millimeter-objektivkamera och en mer detaljerad, smalare version med sitt högra öga, 100 millimeter objektivkamera.
Webbplatsen från vilken dessa bilder togs sitter 1, 073 fot (327 meter) i höjd över Curiositys landningsplats. Sedan jag lämnade webbplatsen, Rovern har klättrat ytterligare 26 meter i höjdled. På senare tid, Mastcam har tagit komponentbilder för ett panorama som tittar uppåt söderut mot uppdragets nästa stora destinationsområde. Det kallas "lerenhet" eftersom observationer från omloppsbana detekterade lermineraler där.
Spela in relä
Möjligheten till några högvolymreläpass med MAVEN orbiter hjälper Curiosity-teamet att få en mängd bilder och annan data den här månaden.
Mest data från Curiosity, genom åren, har förmedlats till jorden av NASA:s Mars Reconnaissance Orbiter (MRO) och Mars Odyssey orbiter, som flyger i nästan cirkulära, nästan polära banor passerar förutsägbart över nyfikenhet vid ungefär samma tidpunkter varje dag. MAVEN, för Mars Atmosphere och Volatile Evolution, flyger en elliptisk bana som varierar mer än 40 gånger från den närmaste till den längsta punkten från Mars. Detta passar MAVENs vetenskapliga fokus på Mars atmosfär men resulterar i variabel täckning för vidarebefordran av roverdata. Vanligtvis, MAVEN passerar över roverplatser när avståndet är för stort för optimala reläer. Dock, under enstaka perioder när dess bana är lågpunkt nära Curiositys plats på Mars, reläerna kan tjäna oerhört bra.
"MAVEN har definitivt potential att flytta massor av data för oss, och vi förväntar oss att använda den ännu mer i framtiden, "sa JPL:s Roy Gladden, chef för NASA:s Mars Relay Network Office. 22 januari -stafetten av 1, 006 megabit toppade det tidigare rekordet på 840 megabit, även inställd av MAVEN, men kan i sin tur bestas av andra gynnsamma MAVEN -stafettmöjligheter under de kommande dagarna.
Rover -teamet tänker sätta Curiositys drill på Vera Rubin Ridge innan han går vidare till Clay Unit. Återuppta användningen av borren kräver en driftig lösning för ett mekaniskt problem som uppstod i slutet av 2016 och avbruten användning av borren. En motor i borrmaskinen som för fram biten relativt stabilisatorpunkter fungerar inte längre tillförlitligt. Lösningen som utvärderas noggrant på en testrover på JPL använder inte stabilisatorpunkterna. Det flyttar hela övningen framåt, med lite förlängd, genom rörelse av robotarmen.