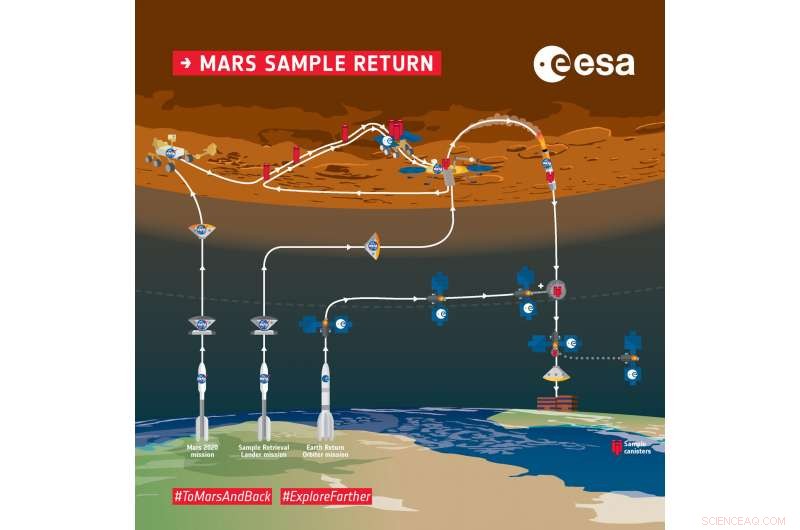
Mars Sample Return översikt infographic. Kredit:ESA–K. Oldenburg
europeiska ingenjörer, tillsammans med Kanada, arbetar med den teknik som behövs för att hitta och hämta prover från Mars, som en del av ESA:s planer på att skicka material från den röda planeten till jorden.
Sample Fetch Rover måste navigera autonomt, upptäcka provrör som samlats in och packats av en tidigare NASA-rover, plocka upp dem och lämna tillbaka dem till jorden.
ESA har valt Airbus för nästa steg i roverns utveckling. Arbete har pågått på deras plats i Stevenage, STORBRITANNIEN, sedan juli 2018 för att avgränsa och fastställa genomförbarheten av roverkonceptet.
ESA Sample Fetch Rover kommer att ingå i Mars Sample Return-kampanjen, med hårdvara från ESA och NASA, som syftar till att leverera material från Mars yta till jorden senast 2031.
För att returnera Mars-proverna, tre noggrant tidsinställda uppdrag krävs.
NASA:s Mars 2020, lanseras i sommar, kommer att skicka Perseverance Rover till Mars. NASA rover kommer att utforska Mars yta för att hämta prover av sten och jord, förslut dem i kapslar och släpp dem på strategiska platser.
En ytterligare NASA-lansering av Sample Retrieval Lander i juli 2026 kommer att leverera ESA Sample Fetch Rover i närheten av Mars 2020-landningsplatsen.
Rovern kommer att färdas upp till 15-20 km, med dagliga steg på ca 200 m, för att självständigt spåra och samla upp till 36 provrör cachade och deponerade av Perseverance.
Sofistikerade algoritmer har redan testats i en artificiell miljö på mars som använder roverns kamera för att känna igen och beräkna den exakta positionen för provrören, som kunde täckas av marsdamm. Airbus samordnar också europeisk industri för utformningen av en robotarm och gripenhet som kommer att finnas ombord på rovern för att plocka upp provrören.
Rören kommer att bäras och sedan överföras, med en annan robotarm från ESA och installerad på Sample Retrieval Lander, till Mars Ascent Vehicle som kommer att lansera proverna, skyddad i en provbehållare i basketstorlek, in i Mars omloppsbana.
ESA:s Earth Return Obiter kommer sedan att tajmas för att fånga behållaren från Mars omloppsbana innan den förs tillbaka till jorden för att landa i Utah, USA.
"Airbus och deras industriella partners tar med sig sin expertis och kunskap inom design av roverteknologier, demonstreras av deras arbete på ESA ExoMars rover Rosalind Franklin, planerad att lanseras 2022, säger Ludovic Duvet, ESA Senior System and Technology Engineer på byråns webbplats i Storbritannien, som har lett ledningen av Sample Fetch Rover-aktiviteter från starten.
"Det är avgörande, ett sådant arbete slutförs med ett samarbetsprojekt. Det har varit en hel del interaktion mellan ESA, NASA:s Jet Propulsion Laboratory som designar landaren, och det Airbus-ledda industrikonsortiet."
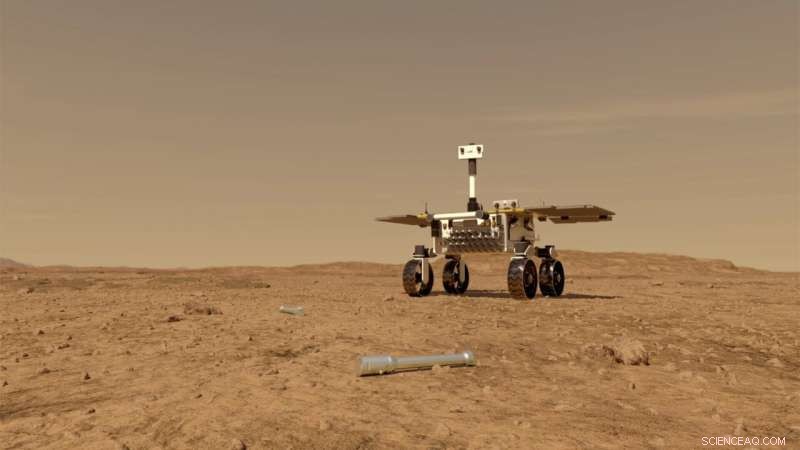
Kredit:NASA/JPL-Caltech
"Det är spännande för vårt Airbus-team att ha en så viktig delaktighet i Mars Sample Return-programmet som är ett stort internationellt samarbete för att uppnå en verklig världsnyhet inom rymdutforskning, säger Ben Boyes, Airbus projektledare för Sample Fetch Rover.
"Sample Fetch Rover-projektet är en fantastisk möjlighet att använda den teknik som utvecklats i Storbritannien för Rosalind Franklin, och bygga vidare på detta med ny banbrytande autonom visuell igenkänning, provhämtningssystem och en snabbare rover för att utföra detta utmanande uppdrag."