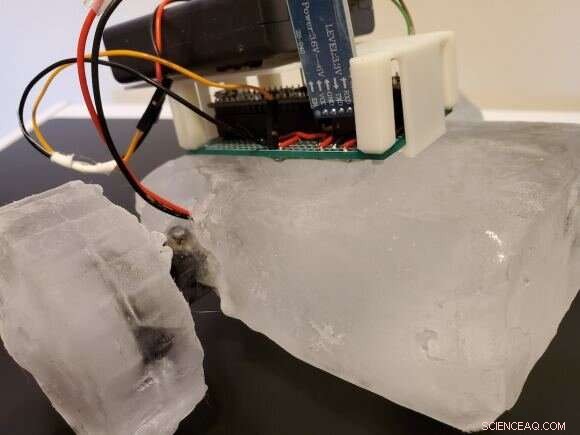
IceBot är bara ett koncept just nu, med några strukturella delar gjorda av is. Kredit:GRASP Lab
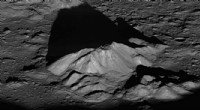
Några av de mest lockande målen i rymdutforskningen är frusna isvärldar. Ta Jupiters måne Europa, till exempel. Det är varmt, salt hav under ytan är begravt under ett månbrett isskikt. Vad är det bästa sättet att utforska det?
Kanske kan en isrobot spela en roll.
Även om världens rymdorganisationer – särskilt NASA – blir bättre och bättre på att bygga robotar för att utforska platser som Mars, dessa robotar har begränsningar. Den kanske främsta av dessa begränsningar är möjligheten till sammanbrott. När en rover på Mars – eller någonstans ännu längre bort – går sönder, det är över. Det finns inget genomförbart sätt att reparera något som MSL Curiosity om det går sönder när man utforskar Mars yta.
Men tänk om världen som utforskas var en frusen en, och roboten var gjord av is? Kan isiga robotar utföra självreparation, även på ett begränsat sätt? Kan de faktiskt tillverkas och monteras där, även delvis?
En färsk artikel med titeln "Robots Made From Ice:An Analysis of Manufacturing Techniques" undersökte den möjligheten. Uppsatsen presenterades vid 2020 IEEE (Institute for Electrical and Electronics Engineers) International Conference on Robotics and Systems. Devin Carroll och Mark Yim skrev den. Carroll är en Ph.D. robotikstudent vid University of Pennsylvania, och Yim är chef för Grasp Lab och professor i maskinteknik vid samma institution.
Hela roboten skulle inte vara gjord av is, självklart. Men en del av strukturen kan vara. Idén är centrerad kring en modulär design som kan reparera sig själv eller till och med replikera sig själv och som kan slutföras på plats efter utplacering, När terränghinder och detaljerna i uppdragets uppgifter förstods bättre.
I sitt abstrakta, de två författarna skriver, "Isen möjliggör ökad flexibilitet i systemdesignen, gör det möjligt för robotstrukturen att designas och byggas efter utplacering efter att uppgifter och terränghinder har identifierats och analyserats bättre."
Självklart, det finns många problem och hinder med denna potentiella teknik. Men det är så alla börjar.
Författarparet gör klart att detta är ett förarbete. "Författarna utforskar ett strukturdrivet tillvägagångssätt för att undersöka kompatibla tillverkningsprocesser med tonvikt på att bevara processenergier, " skriver de. "En mobil robotplattform gjord av is presenteras som ett proof of concept och första demonstration."
Idén är centrerad på en tvåhjulig rover som heter Icebot. Icebot är baserad på designen för Antarktis rovers och har strukturella element gjorda av is.
I sitt arbete, författarparet utförde experiment för att utforska hela idén. Arbetet byggde på två antaganden:
Deras uppsats presenterar också tre allmänna designprinciper.
Det finns ett annat övergripande villkor i allt detta, för. För robotar som verkar på andra världar, energi är en värdefull vara. Varje uppdrag har en energibudget som hanteras noggrant. Ta rymdfarkosten Voyager, till exempel. Deras imponerande livslängd beror åtminstone delvis på extremt noggrann användning av energi. Så mängden energi en isrobot använder för att tillverka och bygga sig själv är avgörande.
Med dessa förutsättningar i åtanke, forskarna kom med några intressanta idéer.
För det första, Hela scenariot skulle sannolikt inte involvera en enda robot utan ett par, fungerar tillsammans. En enhet skulle vara det primära prospekteringsfordonet, och det andra skulle vara ungefär som ett moderskepp och skulle ha tillverknings- och reparationskapacitet.
I en intervju med IEEE spektrum , Devin Carroll förklarade hur det här kan se ut. "När jag tänker på en arktisk (eller planetarisk) utforskningsrobot som innehåller självmodifierings- eller reparationsmöjligheter, föreställer jag mig ett system med två typer av robotar - den första utforskar miljön och samlar in material som behövs för att utföra självförstärkning eller reparation, och det andra är något slags manipulator/tillverkningssystem. Vi kan föreställa oss att robotens utforskningsklass återvänder till en centraliserad plats med en begäran om en plog eller någon annan förstärkning och tillverkningssystemet kommer att kunna fästa förstärkningen direkt på roboten."
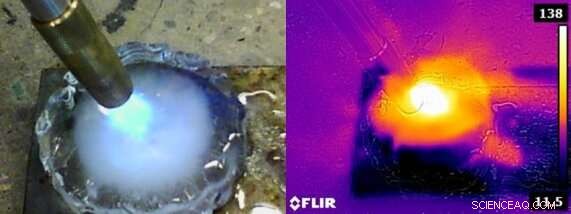
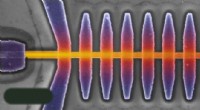
Forskarna testade en öppen låga som en metod för att smälta hål i isen för robotens manöverdon att sättas in i. Vänster:En butanfackla används för att smälta ett hål i isämnet. Till höger:En värmekarta (i grader C) över butanfackla och isämne. Kredit:Carroll och Yim, 2020
Forskarparet utförde några tester för att konkretisera sina idéer. De tittade på olika sätt att manipulera is. För tillverkning, de tittade på formning, där is först skulle smältas och sedan hällas i en form för att formas. De tittade också på 3D-utskrift, och bearbetning. Varje metod har sina för- och nackdelar, och var och en har olika energibehov.
De tittade också på integrering av ställdon. Som förklarat, Manöverdon i sig kan inte vara gjorda av is. Ställdon utsätts för olika påfrestningar, is klarar inte av det. Så integrationen av ställdonen med komponenter gjorda av is är en kritisk operation.
De experimenterade med fyra olika sätt att integrera ställdon:
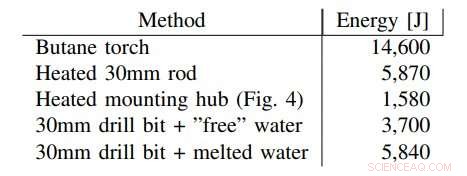
Var och en av metoderna har sina styrkor och svagheter. Var och en har också sina egna energibehov. Tabellen nedan visar energin som krävs för varje metod för att skapa en monteringsficka för ställdonet, och frysa den på plats.
Eftersom detta är ett förarbete, teamet kom inte fram till några permanenta slutsatser. Men deras experiment avslöjade några fallgropar som måste övervinnas om istillverkning och reparation på plats någonsin kommer att genomföras effektivt.
De fann att fästets yta är avgörande för framgång, vilket inte är en överraskning. I ett nötskal, en större yta i fogen är bättre, och hjälper isen att motstå påfrestningar på grund av vridmoment och andra krafter. Istjockleken var också ett problem, vilket inte heller är förvånande.
Författarna sammanfattar sitt arbete i tidningens slutsats. "Det här arbetet är ett steg mot en lättviktare, anpassningsbart robotsystem som kan arbeta i miljöer under noll. Detta system lämpar sig för självkonfigurering, självreplikering och självreparation, " de skriver.
"För att driva på utvecklingen av automatiserade metoder för att skapa och montera detta system planerar vi att driva en gemensam modul som enkelt kan integreras med passiva isblock, " skriver de. Det skulle göra IceBot-systemet enklare och mer modulärt.
De förklarade också vad framtiden har för deras IceBot-koncept:"Ytterligare framtida arbete inkluderar:bestämma en allmän klass av yta som detta system kan röra sig på, metoder för att använda iselement för att interagera med miljön, och ytterligare undersökning av hållfasthetsgränserna för kopplingarna mellan ställdon och isen."
I den Spektrum IEEE intervju, Carroll pratade också om vad som väntar för deras IceBot-satsningar och betonade behovet av modularitet. "Mitt omedelbara fokus ligger på att designa en modulär skarv som vi kan använda för att enkelt och säkert sammanfoga ställdon med isblock samt arbeta för att utveckla en sluteffektor som gör att vi kan manipulera isblock utan att permanent deformera dem via skruvhål eller annat , liknande anslutningsmetoder."
Det finns mycket arbete att göra innan någon isrobotteknik kan implementeras. Men det är en lockande utveckling, och Europa och Enceladus väntar. Byråer som NASA tittar noga på resurser på plats för sina uppdrag till månen och till Mars.
Is är vanlig i solsystemet. Rymden är kall, och många kroppar är täckta av is. Kan en in-situ IceBot finnas i framtiden?