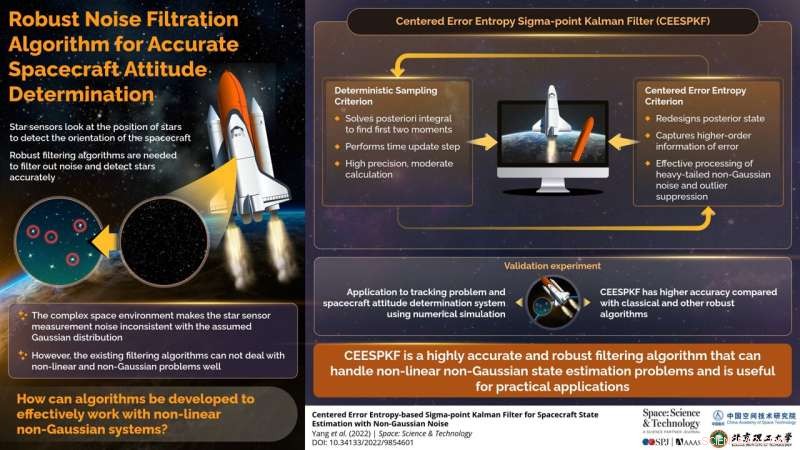
Infografik för entropibaserat sigma-punkts-kalman-filter för centrerat fel för tillståndsuppskattning av rymdfarkoster med icke-gaussiskt brus. Kredit:Rymden:vetenskap och teknik
En rymdfarkosts attitydkinematikmodell, attitydmätningsmodell och filteralgoritm är tre viktiga delar i rymdfarkosternas attitydbestämning, och en högprecisionsfiltreringsalgoritm är nyckeln till attitydbestämning. Det klassiska Kalman-filtret med sigmapunkt (SPKF) används i stor utsträckning i ett tillståndsuppskattningsområde för rymdfarkoster med hypotesen om Gaussiskt vitt brus.
Även om SPKF-algoritmen fungerar bra i idealiskt Gaussiskt vitt brus, är de faktiska driftsförhållandena för rymdfarkosten i omloppsbana komplicerade. Omgivningsstörningar i rymden, jitter från solpaneler och flimmerljud kommer att göra att bruset inte längre uppfyller Gauss-fördelningen och uppvisar en tungsvansad icke-Gaussisk situation, där den klassiska SPKF-filtreringsmetoden inte längre är tillämplig, och det kommer att finnas uppenbar noggrannhetsförsämring eller till och med filtrering av divergens.
I en forskningsartikel som nyligen publicerades i Space:Science &Technology , ett gemensamt team från Army Engineering University of PLA och Chinese Academy of Military Science, föreslog en robust algoritm för Centered Error Entropy Unscented Kalman Filter (CEEUKF) genom att kombinera det deterministiska samplingskriteriet med det centrerade felentropikriteriet.
Först och främst introducerade författaren den klassiska SPKF-algoritmen och CEE-kriteriet. Kalmanfiltret (KF) är det optimala filtret med det linjära Gaussiska ramverket. Men faktiska system är ofta olinjära system, och det finns ingen optimal filtreringsalgoritm för olinjära system. Endast ungefärliga metoder kan användas för de olinjära Gaussiska systemen.
Den olinjära filtreringsalgoritmen baserad på deterministiskt samplingskriterium har högre precision än linjäriseringen av olinjär funktion. De klassiska deterministiska provtagningsmetoderna för icke-linjär gaussisk filtrering är oparfymerat Kalman-filter (UKF), kubatur-Kalman-filter (CKF) och centralt differentiellt Kalman-filter (CDKF). Eftersom dessa metoder innefattar provtagning av deterministiska punkter, kallade författaren dem SPKF-metoder.
Vidare användes den typiska UT-metoden, och UKF granskas. Klassisk UKF använde UT-metoden för att få samplingspunkter och approximera tillståndsmedelvärde och felkovarians för en sannolikhetstäthetsfunktion (PDF). UKF-metoden var lättare att uppskatta PDF än en icke-linjär funktion. Tidsuppdateringssteg och mätningsuppdateringssteg ingick i den.
Därefter tog författaren den viktade kombinationen av den maximala korrentropin (MC) och den minimala felentropin (MEE) som uttrycket för CEE, som hade verifierats vara mer robust än MEE- och MC-kriterierna.
Sedan härledde författaren den centrerade felentropibaserade UKF (CEEUKF) genom CEE-kriteriet och var skyldig att utöka denna algoritm till icke-linjära och icke-Gaussiska fält. CEEUKF innehöll uppdateringssteg för tid och mätning. För det olinjära systemet var tidsuppdateringen av CEEUKF-algoritmen densamma som den klassiska UKF-algoritmen, där sigmapunktssamplingsmetoderna användes för att utföra tidsuppdateringssteget.
Det nya uppdateringssteget för mätning utformades utifrån två huvudarbeten. Den ena är upprättandet av den utökade modellen och den andra är uppskattning av den bakre tillståndet enligt CEE-kriteriet. Eftersom den högre ordningens information om felet fångades av CEE-kriteriet, bör CEESPKF:er vara mer robusta för att hantera icke-Gaussiskt brus än CEEKF.
Efteråt verifierade applikationen till rymdfarkostens attitydbestämningssystem författarens teori. Författaren introducerade först gyromodellen, modell för attitydbestämningssystem och mätmodell. Sedan användes klassisk UKF, maximal korrentropi oparfymerat Kalman-filter (MCUKF) och minimal felentropi oparfymerat Kalman-filter (MEEUKF) och det föreslagna CEEUKF för att utföra simulering.
I Gaussiskt brus var filtreringsnoggrannheten för CEEUKF och MCUKF nära den för den klassiska UKF-metoden. Filtreringsnoggrannheten för MEEUKF var dålig på grund av dess instabilitet. I icke-Gaussiskt brus hade den föreslagna CEEUKF-algoritmen den högsta filtreringsnoggrannheten än den klassiska UKF och andra robusta algoritmer.
Dessutom hade CEEUKF också den snabbaste konvergenshastigheten. Filtreringsresultaten för traditionell UKF hade den lägsta filtreringsnoggrannheten, och några stora uppskattade fel inträffade vid olika tidpunkter. MCUKF hade bättre filtreringseffekt än den traditionella UKF, men den var sämre än den föreslagna CEEUKF. Sammanfattningsvis, jämfört med de befintliga algoritmerna, visade CEEUKF sin utmärkta prestanda under rätt val av kärnbandbredder i simuleringen av rymdfarkostens attityduppskattningssystem. + Utforska vidare