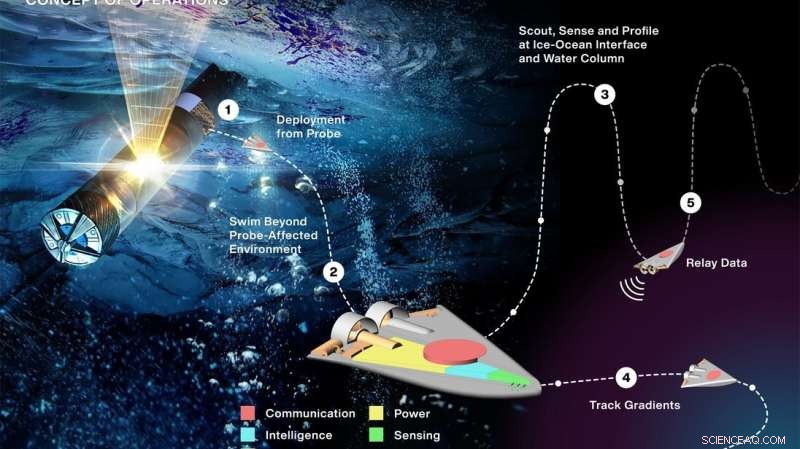
I konceptet Sensing With Independent Micro-Swimmers (SWIM), som illustreras här, skulle dussintals små robotar gå ner genom det iskalla skalet på en avlägsen måne via en kryobot – avbildad till vänster – till havet nedanför. Projektet har fått finansiering från NASA Innovative Advanced Concepts-programmet. Kredit:Jet Propulsion Laboratory
En dag kunde en svärm av robotar i mobilstorlek gå genom vattnet under det miltjocka iskalla skalet på Jupiters måne Europa eller Saturnus måne Enceladus och leta efter tecken på främmande liv. Packade inuti en smal issmältande sond som skulle tunnla genom den frusna skorpan, skulle de små robotarna släppas ut under vattnet och simma långt från sin moderfarkost för att ta måttet på en ny värld.
Det är visionen för Ethan Schaler, en robotteknikingenjör vid NASA:s Jet Propulsion Laboratory i södra Kalifornien, vars koncept Sensing With Independent Micro-Swimmers (SWIM) nyligen belönades med $600 000 i fas II-finansiering från NASA Innovative Advanced Concepts (NIAC)-programmet. Finansieringen, som följer hans utmärkelse 2021 på $125 000 i fas I NIAC-finansiering för att studera genomförbarhet och designalternativ, kommer att tillåta honom och hans team att göra och testa 3D-utskrivna prototyper under de kommande två åren.
En viktig innovation är att Schalers minisimmare skulle vara mycket mindre än andra koncept för robotar för utforskning av planeter, vilket gör att många kan laddas kompakt i en issond. De skulle öka sondens vetenskapliga räckvidd och skulle kunna öka sannolikheten för att upptäcka bevis på liv samtidigt som man bedömer potentiell beboelighet på en avlägsen havsbärande himlakropp.
"Min idé är, var kan vi ta miniatyriserad robotik och tillämpa dem på nya intressanta sätt för att utforska vårt solsystem?" sa Schaler. "Med en svärm av små simrobotar kan vi utforska en mycket större volym havsvatten och förbättra våra mätningar genom att ha flera robotar som samlar in data i samma område."
Ännu inte en del av något NASA-uppdrag, det tidiga SWIM-konceptet föreställer sig kilformade robotar, var och en cirka 5 tum (12 centimeter) lång och cirka 3 till 5 kubiktum (60 till 75 kubikcentimeter) i volym. Ungefär fyra dussin av dem kunde passa i en 4-tums lång (10-centimeter lång) sektion av en cryobot med en diameter på 10 inches (25 centimeter) och tar upp ungefär 15 % av den vetenskapliga nyttolastvolymen. Det skulle lämna gott om utrymme för mer kraftfulla men mindre mobila vetenskapsinstrument som kan samla in data under den långa resan genom isen och ge stationära mätningar i havet.
Europa Clipper-uppdraget, planerat för en uppskjutning 2024, kommer att börja samla in detaljerad vetenskap under flera förbiflygningar med en stor svit av instrument när den anländer till den jovianska månen 2030. Ser man längre in i framtiden, håller man på att se cryobotkoncept för att undersöka sådana havsvärldar. utvecklad genom NASA:s Scientific Exploration Subsurface Access Mechanism for Europa (SESAME)-program, såväl som genom andra NASA-teknologiutvecklingsprogram.

Den här illustrationen visar NASAs cryobot-koncept som kallas Probe som använder radioisotoper för Icy Moons Exploration (PRIME) som sätter ut små kilformade robotar i havet miles under en landare på den frusna ytan av en havsvärld. Kredit:NASA/JPL-Caltech
Bättre tillsammans
Hur ambitiöst SWIM-konceptet än är, skulle dess avsikt vara att minska risken och samtidigt förbättra vetenskapen. Kryoboten skulle vara ansluten via en kommunikationstjuder till den ytbaserade landaren, som i sin tur skulle vara kontaktpunkten med uppdragskontrollanter på jorden. Det tjudrade tillvägagångssättet, tillsammans med begränsat utrymme för att inkludera ett stort framdrivningssystem, betyder att cryoboten sannolikt inte skulle kunna våga sig långt bortom den punkt där is möter havet.
"Tänk om du, efter alla dessa år det tog att komma in i ett hav, kommer genom isskalet på fel plats? Tänk om det finns tecken på liv där borta men inte där du kom in i havet?" sa SWIM-teamforskaren Samuel Howell från JPL, som också arbetar på Europa Clipper. "Genom att ta med oss dessa svärmar av robotar skulle vi kunna se "där borta" för att utforska mycket mer av vår miljö än vad en enda cryobot skulle tillåta."
Howell jämförde konceptet med NASA:s Ingenuity Mars Helicopter, den luftburna följeslagaren till byråns Perseverance-rover på den röda planeten. "Helikoptern utökar roverns räckvidd, och bilderna som den skickar tillbaka är sammanhang för att hjälpa roveren att förstå hur man utforskar sin miljö", sa han. "Om du istället för en helikopter hade ett gäng, skulle du veta mycket mer om din miljö. Det är tanken bakom SWIM."
SWIM skulle också tillåta att data samlas in från cryobotens flammande heta kärnbatteri, som sonden skulle förlita sig på för att smälta en nedåtgående väg genom isen. Väl i havet skulle värmen från batteriet skapa en termisk bubbla, långsamt smälta isen ovanför och potentiellt orsaka reaktioner som kan förändra vattnets kemi, sa Schaler.
Dessutom kunde SWIM-robotarna "flockas" tillsammans i ett beteende inspirerat av fiskar eller fåglar, och därigenom minska fel i data genom deras överlappande mätningar. Denna gruppdata kan också visa gradienter:temperatur eller salthalt, till exempel, ökar över svärmens samlade sensorer och pekar mot källan till signalen som de upptäcker.
"Om det finns energigradienter eller kemiska gradienter, är det så livet kan börja uppstå. Vi skulle behöva gå uppströms från cryoboten för att känna av dem," sa Schaler.
Varje robot skulle ha sitt eget framdrivningssystem, inbyggd dator och ultraljudskommunikationssystem, tillsammans med enkla sensorer för temperatur, salthalt, surhet och tryck. Kemiska sensorer för att övervaka biomarkörer – tecken på liv – kommer att ingå i Schalers fas II-studie. + Utforska vidare