Intuitive Machines fick nyligen ett stort genombrott och blev framgångsrikt den första icke-statliga enheten som landade på månen i februari. Åtminstone var landningen delvis framgångsrik - företagets Odysseus-landare hamnade på sin sida, även om dess instrument och kommunikationslänkar förblev åtminstone delvis funktionella. Det uppdraget, kallat IM-1, var det första i en rad ambitiösa uppdrag som företaget har planerat. Och de släppte nyligen ett papper på LPSC 2024-konferensen som beskriver funktionerna hos en unik hoppande robot som kommer att åka på sitt nästa månuppdrag.
Känd som South Pole Hopper (eller S.P. Hopper), kommer roboten att vara den första i en ny klass som heter µNova. Denna miniatyriserade farkost väger endast 35 kg och är endast 70 cm lång och är en fristående rymdfarkost som kan fungera helt autonomt. Det måste göra detta för att slutföra sitt uppdrag att utforska regionen runt de permanent skuggade regionerna (PSR) vid månens sydpol.
Specifikt har hantverket fyra distinkta mål:
Inget av dessa mål kräver individuellt S.P. Hoppers mest anmärkningsvärda särdrag – men det skulle säkert vara till hjälp att slutföra dem – den kan "hoppa" genom att stöta sig från månytan och landa i ett område som den väljer helt autonomt – även i en PSR. Det kan göra det i en vinkel på upp till 10 grader, är företaget snabba med att påpeka, med tanke på dess senaste svårigheter med rymdskeppsvinkel.
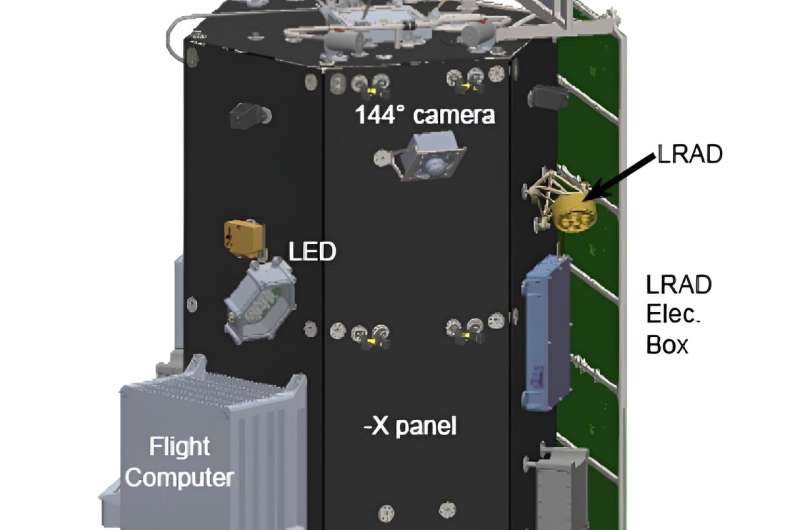
Uppsatsen beskriver flera tekniska egenskaper hos tratten – inklusive det faktum att den kommer att använda ett trådlöst LTE-system för att kommunicera. För att samla in de data som krävs för sitt uppdrag har den tre huvudsakliga vetenskapliga instrument:en uppsättning CMOS-kameror, vars primära uppgift är att hjälpa till med autonom navigering men kan också skicka bilder tillbaka till jorden för att analyseras; LRAD-termostapelsensorsystemet; designad för att fånga ljusstyrkemätningar av regoliten, och PLWS, en miniatyr neutronspektrometer, speciellt utformad för att leta efter väte i rymden.
Men den kanske mest intressanta delen av tidningen beskriver sin färdplan. S. P. Hopper är designad för att göra 5-möjligen 6-hopp när den landar på månens sydpol. Den första blir en "commissioning hop" som bara kommer att passera 20 m eller så. Nästa kommer att vara en 100 meter lång "proof of concept"-hopp som kommer att visa att en hoppande robot är ett gångbart transportsätt på månen.
Efter dessa första flygningar kommer S. P. Hopper att flyga cirka 300 m till kanten av Marston-kratern, en del av Shackleton-de Gerlache-ryggen. Den kommer då att flyga in i själva kratern, som är en PSR, och sedan flyga tillbaka ut till åsen igen. Om det finns tillräckligt med bränsle kvar planerar Intuitive Machines en sjätte undersökningsflygning för att titta på allt intressant i närheten.
För närvarande är IM-2, flygningen som ska ta S.P. Hopper till Sydpolen, planerad att lanseras någon gång i år. Med tanke på Intuitive Machines relativa framgång med Odysseus-landaren, finns det mycket optimism om framgången för detta uppdrag också. För nu får vi dock vänta och se om företaget kan genomföra ett ännu mer framgångsrikt uppföljningsuppdrag.
Mer information: Uppsats:www.hou.usra.edu/meetings/lpsc2024/pdf/1162.pdf
Tillhandahålls av Universe Today