En ny datormodell efterliknar måndamm så väl att det kan leda till smidigare och säkrare månrobotar. Verktyget, utvecklat av forskare vid University of Bristol och baserat på Bristol Robotics Laboratory, skulle kunna användas för att träna astronauter inför månuppdrag.
Deras forskning är publicerad i tidskriften Frontiers in Space Technologies .
I samarbete med sin industripartner, Thales Alenia Space i Storbritannien, som har ett specifikt intresse av att skapa fungerande robotsystem för rymdtillämpningar, undersökte teamet en virtuell version av regolit, ett annat namn för måndamm.
Lunar regolith är av särskilt intresse för de kommande månutforskningsuppdrag som planeras under det kommande decenniet. Ur den kan forskare potentiellt utvinna värdefulla resurser som syre, raketbränsle eller konstruktionsmaterial för att stödja en långsiktig närvaro på månen.
För att samla regolit framstår fjärrstyrda robotar som ett praktiskt val på grund av deras lägre risker och kostnader jämfört med mänsklig rymdfärd. Men att använda robotar över dessa stora avstånd introducerar stora förseningar i systemet, vilket gör dem svårare att kontrollera.
Nu när teamet vet att den här simuleringen beter sig på samma sätt som verkligheten kan de använda den för att spegla driften av en robot på månen. Detta tillvägagångssätt tillåter operatörer att styra roboten utan förseningar, vilket ger en smidigare och effektivare upplevelse.
Huvudförfattaren Joe Louca, baserad på Bristols School of Engineering Mathematics and Technology förklarade:"Tänk på det som ett realistiskt videospel som utspelar sig på månen - vi vill se till att den virtuella versionen av måndamm beter sig precis som den faktiska saken, så att om vi använder den för att styra en robot på månen, kommer den att bete sig som vi förväntar oss. Den här modellen är exakt, skalbar och lätt, så den kan användas för att stödja kommande månutforskningsuppdrag."
Denna studie följde av tidigare arbete i teamet, som fann att expertrobotoperatörer vill träna på sina system med gradvis ökande risk och realism. Det innebär att börja i en simulering och bygga upp till att använda fysiska modeller innan du går vidare till att använda det faktiska systemet. En korrekt simuleringsmodell är avgörande för att träna och utveckla operatörens förtroende för systemet.
Medan vissa särskilt noggranna modeller av måndamm tidigare hade utvecklats, är dessa så detaljerade att de kräver mycket beräkningstid, vilket gör dem för långsamma för att kontrollera en robot smidigt. Forskare från DLR (German Aerospace Centre) tacklade denna utmaning genom att utveckla en virtuell modell av regolit som tar hänsyn till dess densitet, klibbighet och friktion, såväl som månens minskade gravitation. Deras modell är av intresse för rymdindustrin eftersom den är lätt på beräkningsresurser och därför kan köras i realtid. Det fungerar dock bäst med små mängder måndamm.
Bristol-teamets mål var att först utöka modellen så att den kan hantera mer regolit, samtidigt som den förblir tillräckligt lätt för att köras i realtid, och sedan verifiera den experimentellt.
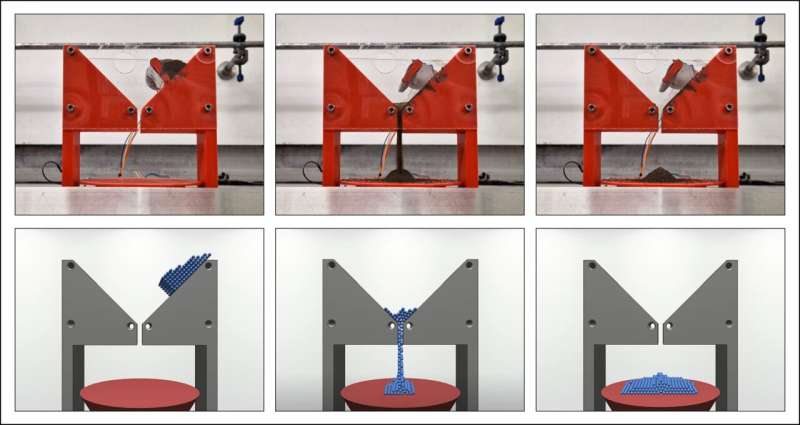
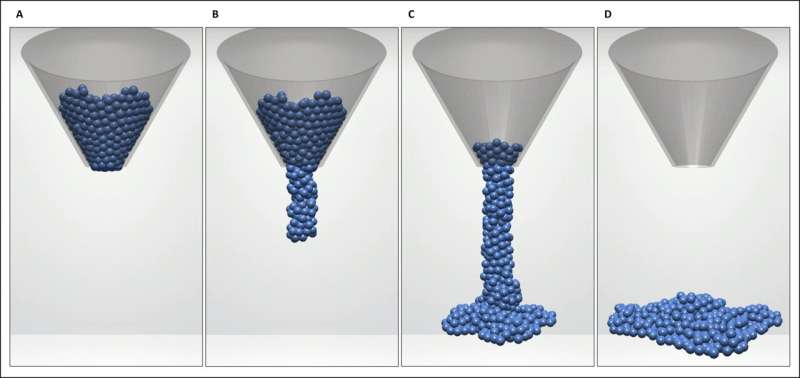
Louca tillade, "Vårt primära fokus under hela det här projektet var att förbättra användarupplevelsen för operatörer av dessa system – hur skulle vi kunna göra deras jobb enklare? Vi började med den ursprungliga virtuella regolitmodellen utvecklad av DLR och modifierade den för att göra den mer skalbar. Sedan genomförde vi en serie experiment – hälften i en simulerad miljö, hälften i den verkliga världen – för att mäta om det virtuella måndammet uppförde sig på samma sätt som sin motsvarighet i den verkliga världen."
Eftersom denna modell av regolit är lovande för att vara exakt, skalbar och lätt nog att användas i realtid, kommer teamet att undersöka om den kan användas när robotar används för att samla regoliter.
De planerar också att undersöka om ett liknande system skulle kunna utvecklas för att simulera Mars mark, vilket kan vara till nytta för framtida prospekteringsuppdrag, eller att utbilda forskare att hantera material från det efterlängtade Mars Sample Return-uppdraget.
Mer information: Joe Louca et al, Verifiering av en virtuell månregolitsimulant, Frontiers in Space Technologies (2024). DOI:10.3389/frspt.2024.1303964
Tillhandahålls av University of Bristol