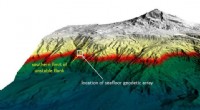
Forskare har nu beskrivit en ny fysiklag som står för elastohydrodynamisk smörjning (EHL) friktion, som borde främja ett brett utbud av robotteknologier. EHL -friktion uppstår när två fasta ytor kommer i kontakt med ett tunt lager av vätska mellan dem. Kredit:Lilian Hsiao
Även om robotenheter används i allt från löpande band till medicin, ingenjörer har svårt att redogöra för friktionen som uppstår när dessa robotar greppar föremål – särskilt i våta miljöer. Forskare har nu upptäckt en ny fysiklag som står för denna typ av friktion, som borde främja ett brett utbud av robotteknologier.
"Vårt arbete här öppnar dörren för att skapa mer pålitliga och funktionella haptiska och robotiska enheter i applikationer som telekirurgi och tillverkning, säger Lilian Hsiao, en biträdande professor i kemisk och biomolekylär teknik vid North Carolina State University och motsvarande författare till en artikel om arbetet.
Det handlar om något som kallas elastohydrodynamic lubrication (EHL) friktion, vilket är den friktion som uppstår när två fasta ytor kommer i kontakt med ett tunt lager av vätska mellan dem. Detta skulle inkludera friktionen som uppstår när du gnuggar fingertopparna mot varandra, med vätskan som det tunna lagret av naturligt förekommande olja på din hud. Men det kan också gälla en robotklo som lyfter ett föremål som har belagts med olja, eller till en kirurgisk anordning som används inuti människokroppen.
En anledning till att friktion är viktig är att det hjälper oss att hålla saker utan att tappa dem.
"Att förstå friktion är intuitivt för människor - även när vi hanterar disk med tvål, ", säger Hsiao. "Men det är extremt svårt att ta hänsyn till EHL-friktion när man utvecklar material som styr greppförmågan i robotar."
För att utveckla material som hjälper till att kontrollera EHL -friktion, ingenjörer skulle behöva ett ramverk som kan tillämpas enhetligt på en mängd olika mönster, material och dynamiska driftsförhållanden. Och det är precis vad forskarna har upptäckt.
"Denna lag kan användas för att redogöra för EHL-friktion, och kan appliceras på många olika mjuka system - så länge föremålens ytor är mönstrade, "Säger Hsiao.
I detta sammanhang, ytmönster kan vara allt från de något upphöjda ytorna på fingertopparna till spår i ytan på ett robotverktyg.
Den nya fysiska principen, utvecklad gemensamt av Hsiao och hennes doktorand Yunhu Peng, använder sig av fyra ekvationer för att redogöra för alla fysiska krafter som spelar in för att förstå EHL-friktion. I tidningen, forskargruppen demonstrerade lagen i tre system:mänskliga fingrar; en bioinspirerad robotfingertopp; och ett verktyg som kallas tribo-reometer, som används för att mäta friktionskrafter. Peng är första författare till tidningen.
"Dessa resultat är mycket användbara i robothänder som har mer nyanserade kontroller för att tillförlitligt hantera tillverkningsprocesser, " säger Hsiao. "Och det har uppenbara tillämpningar inom telekirurgin, där kirurger fjärrstyr robotanordningar för att utföra kirurgiska ingrepp. Vi ser detta som ett grundläggande framsteg för att förstå beröring och för att kontrollera beröring i syntetiska system."
Pappret, "Elastohydrodynamisk friktion av robot- och mänskliga fingrar på mjuka mikromönstrade substrat, "publiceras i Naturmaterial .