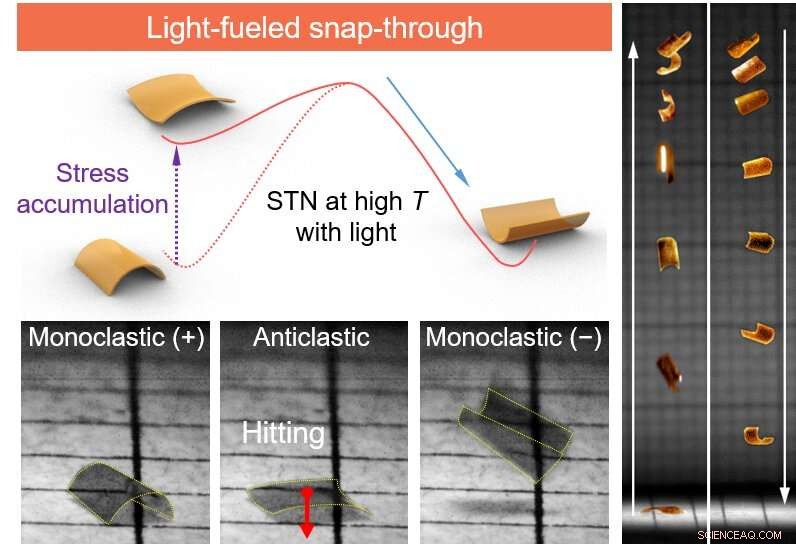
Den fotoinducerade bistabila strukturen gör det möjligt för den fotoaktiva flytande kristallina polymeren att uppnå genomsnäppningsinspirerat hopp. Effektiv fotoinducerad energiackumulering och frisättning induceras av 270° supertvinnad nematisk geometri av fotoaktiva molekyler. Kredit:Inha University
Hopprörelser observeras vanligtvis i naturen, inklusive för däggdjur, insekter och andra landvarelser; denna flytande rörelse syftar till snabb rörlighet, en snabbare ankomsttid till en destination över stora hinder och ojämn terräng. Hoppets kvalitativa egenskaper såsom riktning och höjd regleras av enbart bråkdelar av potentiell och kinetisk energi. Dessutom, en organism kan välja att upprepa sina hoppande rörelser som bestäms av sin egen fria vilja.
För att implementera en liknande typ av hoppbeteende i robotsystem, det måste finnas skräddarsydda konstruktioner som genererar en omedelbar energiöverföring till ett substrat med tillräcklig ackumulerad energi. Många av de nuvarande hopprobotarna på fältet anpassar sig genom att sparka eller trycka på underlaget med sina ben; detta drivs vanligtvis av motoriserade ställdon eller batteridrivna system. Dock, dessa system tillför oönskad vikt till de hoppande robotarna och är också svåra att fästa på en miniatyriserad kropp.
En fotoaktiv flytande kristallin polymer kan hoppa rörelse eftersom det anisotropa fotomekaniska svaret hos den fotoaktiva molekylära maskinen gör det möjligt för den flytande kristallina polymeren att ackumulera och frigöra fotoinducerad energi effektivt. Den fotoaktiva molekylära maskinen, en azobensendel, är inriktad med flytande kristallmolekyler som ger riktad fotoinducerad kontraktion från fotoisomerisering av azobensenen. 270° supertvinnad nematisk molekylgeometri på toppen och botten av den fotoaktiva flytande kristallina polymeren inducerar ett icke-isometriskt bistabilt tillstånd under aktinisk ljusbestrålning med samtidig uppvärmning. Den bistabila strukturen är känd för att ackumulera energi under energibarriären för att deformeras mellan två stabila strukturer. Under deformationsprocessen, den ackumulerade energin börjar överskrida energibarriären och fortsätter till en omedelbar frigöring, den så kallade "snap-through". Omedelbar energifrisättning i fotoaktiv flytande kristallin polymer genererar hopprörelsen genom att stöta på substratet. Anmärkningsvärt, den maximala hopphöjden når 15,5 kroppslängder med den maximala momentana hastigheten på 880 BL s -1 .
En formidabel utmaning för en hopprobot är kontinuerlig hoppning på begäran. Till skillnad från motoriserade hopprobotar, det är svårt att implementera kontinuerliga eller riktade hopp för en hoppande robot med en monolitisk kropp eftersom vinkeln mellan roboten och aktiveringskällan ändras kontinuerligt. Den dubbelriktade ljusbestrålningen gör det möjligt för den fotoaktiva flytande kristallina polymeren att hoppa kontinuerligt på två olika sätt:slag- och sparkbaserade fotomekaniska hopp. Oavsett landningsriktning eller krökning av den mjuka roboten, on-demand ljusbestrålning från toppen eller botten ger hopprörelser i mjuka robotar.
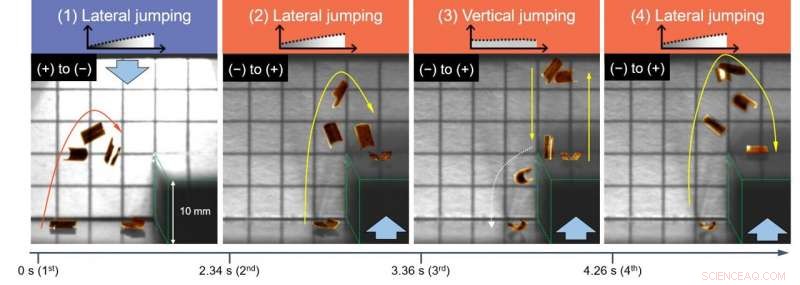
Den guidade resan av fotoaktiv flytande kristallin polymer med mönstrat ljus (ett från toppen och ett annat från botten) för ankomst till destinationen inom några sekunder. Kredit:Inha University
Dessutom, det fotomekaniska hoppet kan styras genom att generera en strålintensitetsgradient. Gradientljusintensiteten bryter symmetri av fotoisomerisering i en monolitisk fotoaktiv flytande kristallin polymer som genererar riktning av kinetisk energi. Genom att kombinera dubbelriktad ljusbestrålning med en strålintensitetsgradient, den miniatyriserade fotoaktiva flytande kristallina polymeren kan anlända till sin destination, även övervinna stora hinder.
Denna oöverträffade strategi kommer att ge insikter i kontaktlös hoppmanövrerbarhet i miniatyriserade mjuka robotar.