Den mänskliga roboten WALK-MAN är tänkt för att stödja räddningsteam. Roboten kan också aktivera en brandsläckare för att eliminera branden. Kredit:IIT-Istituto Italiano di Tecnologia
Forskare vid IIT-Istituto Italiano di Tecnologia testade en ny version av den mänskliga roboten WALK-MAN för att stödja räddningsteam vid bränder. Roboten kan lokalisera elden och gå mot den, och sedan aktivera en släckare. Under operationen, den samlar in bilder och sänder dem tillbaka till räddningsteam, som kan utvärdera situationen och styra roboten på distans. Den nya WALK-MAN-designen har en lättare överkropp och nya händer för att minska byggkostnaderna och förbättra prestandan.
WALK-MAN-roboten är nu i sin sista valideringsfas. Projektet involverade också universitetet i Pisa i Italien, École Polytechnique Fédérale de Lausanne (EPFL) i Schweiz, Karlsruhe Institute of Technology (KIT) i Tyskland och Université Catholique de Louvain (UCL) i Belgien. Partnerna bidrog till rörelsekontroll, uppfattningsförmåga, råd och rörelseplanering, simuleringsverktyg och manipulationskontroll.
Valideringsscenariot definierades i samarbete med det italienska civilskyddsorganet i Florens, som deltog i projektet i en rådgivande egenskap. Under det sista provet, WALK-MAN behandlade ett scenario som representerade en industrianläggning skadad av en jordbävning där gasläckor och brand förekom, en farlig situation för människor. Scenariot återskapades i IIT-laboratorier, där roboten kunde navigera genom ett skadat rum och utföra fyra specifika uppgifter:öppna och korsa dörren för att komma in i zonen; lokalisering av ventilen som styr gasläckaget och stängning av den; ta bort skräp i dess väg; och identifiera branden och aktivera en brandsläckare.
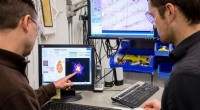
Roboten styrs av en mänsklig operatör genom ett virtuellt gränssnitt och en sensoriserad kostym, som Tony Stark i Iron Man . Operatören styr roboten från en station belägen på avstånd från olycksplatsen, ta emot bilder och annan information från robotens perceptionssystem.
Den första versionen av WALK-MAN släpptes 2015, men forskare ville introducera nya material och optimera designen för att minska tillverkningskostnaderna och förbättra prestandan. Den nya versionen av WALK-MAN har en lättare överkropp, som tog sex månader att utveckla, involverar ett team på cirka 10 personer koordinerat av Nikolaos Tsagarakis, forskare vid IIT och koordinator för WALK-MAN-projektet.

WALK-MAN-roboten är en humanoid robot 1,85 meter lång, gjorda av lätta metaller, järn och plast. Roboten fjärrstyrs av en mänsklig operatör genom ett virtuellt gränssnitt och en sensoriserad kostym, som tillåter att manövrera roboten mycket naturligt, som en avatar. Kredit:IIT-Istituto Italiano di Tecnologia
Den nya WALK-MAN är en humanoid robot 1,85 meter hög gjord av lättviktsmaterial, inklusive Ergal (60 procent), magnesiumlegeringar (25 procent) och titan, järn och plast. Forskare minskade dess vikt från prototypens 133 kilo till 102 kilo, gör roboten mer dynamisk. Benen kan röra sig snabbare, ha en lättare överkroppsmassa att bära. Den högre dynamiska prestandan gör att roboten kan reagera snabbare med sina ben, bibehålla sin balans under påverkan av fysiska interaktionsstörningar – detta är mycket viktigt för att anpassa sin takt till ojämn terräng och varierande interaktionsscenarier. Den lättare överkroppen minskar också sin energiförbrukning och WALK-MAN kan arbeta med ett mindre batteri (1 kWh) i cirka två timmar.
Den lättare överkroppen är gjord av magnesiumlegeringar och kompositstrukturer, och den drivs av en ny version av lätta mjuka ställdon. Dess prestanda har förbättrats, med en högre nyttolast (10 kg/arm) än den ursprungliga (7 kg/arm); Således, den kan bära tunga föremål i mer än 10 minuter.
Den nya överkroppen är också mer kompakt i storleken (62 cm axelbredd, 31 cm båldjup), ger roboten stor flexibilitet att passera genom standarddörrar och trånga passager.
Händerna är en ny version av Soft-Hand utvecklad av Centro Ricerche E. Piaggio vid University of Pisa (grupp av Prof. A. Bicchi) i samarbete med IIT. De innehåller kompositmaterial för fingrarna, och har ett mer mänskligt förhållande mellan finger-till-handflatsstorlek som gör att WALK-MAN kan förstå en mängd olika objektformer. Trots deras viktminskning, händerna har samma styrka som originalversionen, med liknande mångsidighet i hantering och fysisk robusthet.
WALK-MAN kaross styrs av 32 motorer och styrkort, fyra kraft- och vridmomentsensorer vid händer och fötter, och två accelerometrar för att kontrollera dess balans. Dess leder visar elastiska rörelser som gör att roboten kan vara följsam och ha säker interaktion med människor och miljö. Dess mjukvaruarkitektur är baserad på XBotCore-ramverket, YARP plattform, ROS och Gazebo. The robot head has cameras, a 3-D laser scanner, and microphone sensors. I framtiden, it can be also equipped with chemical sensors for detecting toxic agents.