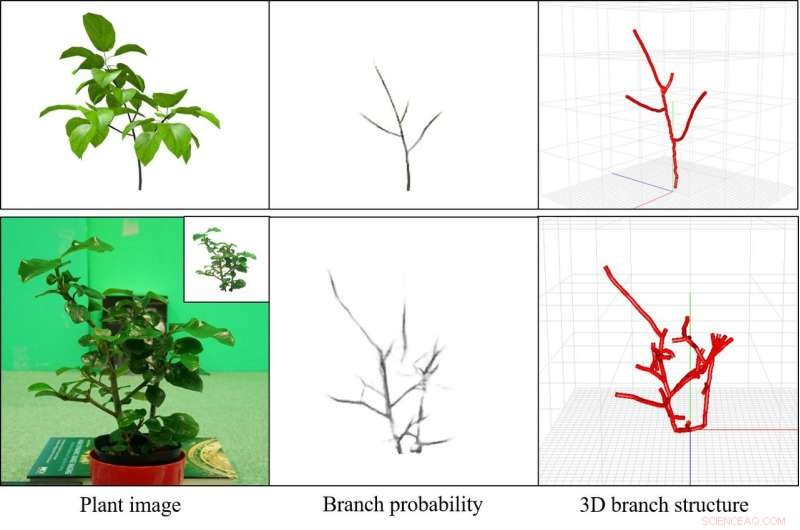
Figur 1. Uppskattad 3D -växtgrenstruktur. Kredit:Osaka University
Att noggrant förstå tillväxten av grenar och löv på individuella fruktbärande träd och hantera dem på ett adekvat sätt är viktigt för att förbättra deras kvalitet. Dock, daglig observation och avancerad kunskap är nödvändiga för korrekt skötsel och odling av träd, så trädhanteringssystem som använder kameror drar till sig uppmärksamhet. Den automatiska 3D-modelleringen av växtformer och grenstrukturer från bilder är en oumbärlig teknik för att bedriva både arbetsbesparande odling och förbättring av produktkvaliteten.
Tredimensionell (3-D) rekonstruktion från flera bilder erhållna från olika synvinklar har aktivt undersökts. Dock, det var svårt att rekonstruera strukturen hos föremål som har dolda delar, som växter med grenstrukturer gömda under sina löv.
Genom att kombinera den ursprungliga bild-till-bild-översättningsmetoden i en Bayesiansk ram för djupinlärning och 3D-rekonstruktion, en grupp forskare under ledning av Fumio Okura uppskattade förekomsten av sannolikhet för grenar som är gömda under löv i bilder. Med hjälp av dessa uppskattade filialpositioner, de uppnådde noggrann 3D-rekonstruktion av grenstrukturer, inklusive de gömda under löv. Specifikt, de konverterade bilder av lummiga växter till bilder som visar sannolikheten för grenexistens, därigenom uppnå 3D-rekonstruktion.
Resultaten av denna studie kommer att presenteras vid EEE/CVF -konferensen om datorsyn och mönsterigenkänning (CVPR 2018) som kommer att hållas från 18 juni till 22 juni, 2018. Papperet som presenterades vid konferensen kommer att publiceras i Computer Vision Foundation Open Access som en del av konferensförhandlingarna den 4 juni, 2018.
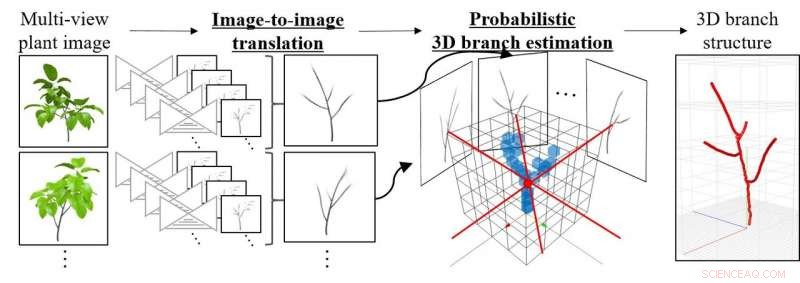
Fig.2. Flödet av den föreslagna metoden. Upphovsman:Osaka University
Resultaten kommer att bidra till odling och hantering av växter genom artificiell intelligens (AI) och bildanalys. De kommer att vara till hjälp för att förverkliga framtida odlingsteknik för att möjliggöra (a) detaljerad daglig hantering av gren-/lövnivåprocessen för att odla växter på platser där odlarens syn inte kan nås genom att filma med en drönare eller robot, (b) hitta de bästa beskärnings- eller beskärningsmetoderna för växter, och (c) förutsäga framtida tillväxt av växter.
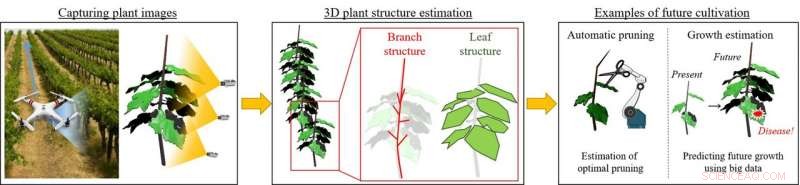
Fig.3. Framtida odling via växtstrukturuppskattning. Kredit:Osaka University














