Plan har många sensorer, tillhandahålla alla typer av användbar information. Kredit:vaalaa/Shutterstock.com
Det uppenbara sambandet mellan dödliga flygplanskrascher i Indonesien och Etiopien kretsar kring felet i en enda sensor. Jag vet hur det är:För några år sedan, medan jag flög en Cessna 182-RG från Albany, New York, till Fort Meade, Maryland, min flyghastighetsindikator visade att jag flög med en hastighet så låg att mitt plan riskerade att inte längre generera tillräckligt med lyft för att stanna i luften.
Hade jag litat på min flyghastighetssensor, Jag skulle ha tryckt ner planets nos i ett försök att återfå fart, och möjligen belastat flygplanets ram för mycket, eller kommit farligt nära marken. Men även små flygplan är packade med sensorer:Medan jag är orolig för min flyghastighet, Jag märkte att mitt plan stannade på samma höjd, motorn genererade samma mängd kraft, vingarna mötte luften i en konstant vinkel och jag rörde mig fortfarande över marken i samma hastighet som jag hade varit innan flyghastigheten påstås ha sjunkit.
Så istället för att överbelasta och potentiellt krascha mitt plan, Jag kunde fixa den problematiska sensorn och fortsätta min flygning utan ytterligare incidenter. Som ett resultat, Jag började undersöka hur datorer kan använda data från olika flygplanssensorer för att hjälpa piloter att förstå om det händer en verklig nödsituation, eller något mycket mindre allvarligt.
Boeings svar på sina krascher har inkluderat att designa en mjukvaruuppdatering som kommer att förlita sig på två sensorer istället för en. Det kanske inte räcker.

En Cessna 182 under flygning. Kredit:Rob Hodgkins/Flickr, CC BY-SA
Korskontrollera sensordata
Som ett plan trotsar gravitationen, aerodynamiska principer uttryckta som matematiska formler styr dess flygning. De flesta av ett flygplans sensorer är avsedda att övervaka delar av dessa formler, för att försäkra piloter om att allt är som det ska – eller för att varna dem om att något har gått fel.
Mitt team utvecklade ett datorsystem som tittar på information från många sensorer, jämföra sina avläsningar med varandra och med relevanta matematiska formler. Detta system kan upptäcka inkonsekventa data, ange vilka sensorer som sannolikt har misslyckats och, under vissa omständigheter, använd andra data för att uppskatta de korrekta värdena som dessa sensorer ska leverera.
Till exempel, min Cessna stötte på problem när den primära lufthastighetssensorn, kallas ett "pitotrör, " frös i kall luft. Andra sensorer ombord samlar in relaterad information:GPS-mottagare mäter hur snabbt flygplanet täcker marken. Vindhastighetsdata finns tillgänglig från datormodeller som förutspår väder före flygningen. Omborddatorer kan beräkna en uppskattad flyghastighet genom att kombinera GPS-data med information om vindhastighet och riktning.
Om datorns beräknade flyghastighet överensstämmer med sensoravläsningarna, mest troligt är allt bra. Om de inte håller med, då är något fel – men vad? Det visar sig att dessa beräkningar inte överensstämmer på olika sätt, beroende på vilken – eller flera – av GPS:en, vinddata eller flyghastighetssensorer är fel.
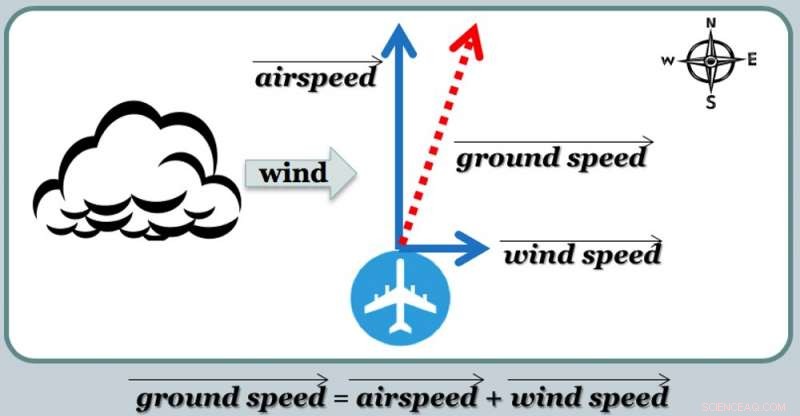
Med hjälp av information om markhastighet och aktuella vindförhållanden, en dator kan uppskatta planets flyghastighet. Kredit:Shigeru Imai och Carlos Varela, CC BY-ND
Ett test med riktiga data
Vi testade vårt datorprogram med riktiga data från kraschen 2009 av Air France Flight 447. Undersökningen efter kraschen visade att tre olika pitotrör frös upp, levererar en felaktig flyghastighetsavläsning och utlöser en kedja av händelser som slutar med att planet störtade ner i Atlanten, dödade 228 passagerare och besättning.
Flygdata visade att när pitotrören frös, de slutade plötsligt registrera flyghastigheten som 480 knop, och rapporterade istället att planet gick genom luften i 180 knop – så långsamt stängde autopiloten av sig själv och larmade de mänskliga piloterna att det fanns ett problem.
Men GPS:en ombord registrerade att planet färdades över marken i 490 knop. Och datormodeller av väder indikerade att vinden kom från baksidan av planet i cirka 10 knop.
När vi matade dessa data till vårt datorsystem, den upptäckte att pitotrören hade misslyckats, och uppskattade planets verkliga flyghastighet inom fem sekunder. Den upptäckte också när pitotrören tinade igen, cirka 40 sekunder efter att de frös, och kunde bekräfta att deras avläsningar återigen var tillförlitliga.
En annan sorts test
Vi använde också vårt system för att identifiera vad som hände med Tuninter Flight 1153, som dök i Medelhavet 2005 på väg från Italien till Tunisien, dödade 16 av de 39 personerna ombord.
Efter olyckan, undersökningen visade att underhållsarbetare av misstag hade installerat fel bränslemängdsindikator på planet, så det rapporterade 2, 700 kg bränsle fanns i tankarna, när planet egentligen bara bar 550 kg. Mänskliga piloter märkte inte felet, och planet fick slut på bränsle.
Bränslet är tungt, fastän, och dess vikt påverkar ett flygplans prestanda. Ett plan med för lite bränsle hade hanterats annorlunda än ett med rätt mängd. För att beräkna om planet uppförde sig som det skulle, med rätt mängd bränsle ombord, vi använde det aerodynamiska matematiska förhållandet mellan flyghastighet och lyft. När ett plan är i plan flygning, lyft är lika med vikt. Allt annat är sig likt, ett tyngre plan borde ha gått långsammare än Tuninterplanet.
Vårt program modellerar endast kryssningsfaser av flygningen, där planet står stilla, planflygning – inte accelerera eller ändra höjd. Men det hade varit tillräckligt att upptäcka att planet var för lätt och varna piloterna, som kunde ha vänt eller landat någon annanstans för att tanka. Att lägga till information om andra faser av flygningen kan förbättra systemets noggrannhet och lyhördhet.
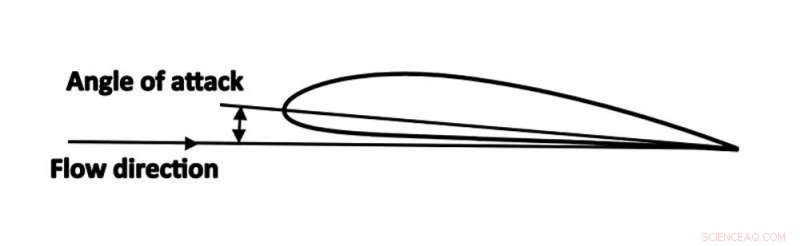
Anfallsvinkeln beskriver hur vingarna möter den mötande luften. Kredit:J Doug McLean/Wikimedia Commons, CC BY-SA
Hur är det med Boeing 737 Max 8-krascher?
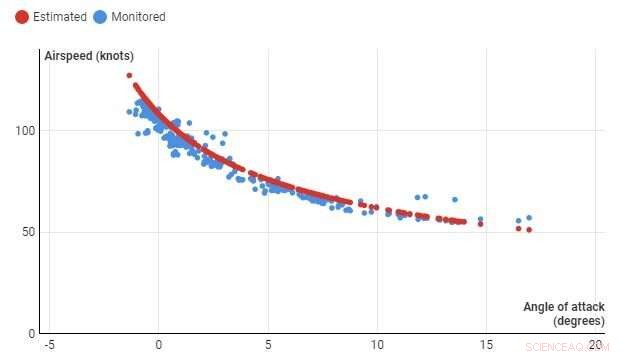
Hela utbudet av data om Lion Air 610 och Ethiopian Airlines 302 är ännu inte tillgängligt för allmänheten, men tidiga rapporter tyder på att det fanns ett problem med en av anfallsvinkelsensorerna. Mitt forskarteam utvecklade en metod för att kontrollera den enhetens noggrannhet baserat på planets flyghastighet.
Vi använde aerodynamik och en flygsimulator för att mäta hur variationer i anfallsvinkeln – den branthet med vilken vingarna möter den mötande luften – förändrade den horisontella och vertikala hastigheten för en Cessna 172. Uppgifterna överensstämde med prestandan hos en faktisk Cessna 172 under flygning. Med vår modell och vårt system, vi kan skilja mellan en faktisk nödsituation – en farligt hög attackvinkel – och en felaktig sensor som ger felaktiga data.
De faktiska siffrorna för en Boeing 737 Max 8 skulle vara annorlunda, självklart, men principen är fortfarande densamma, använda det matematiska förhållandet mellan anfallsvinkel och flyghastighet för att dubbelkolla varandra, och för att identifiera felaktiga sensorer.
Kredit:The Conversation
Ännu bättre
När mitt team fortsätter att utveckla programvara för analys av flygdata, vi arbetar också med att förse den med bättre data. En potentiell källa kan vara att låta flygplan kommunicera direkt med varandra om väder- och vindförhållanden på specifika platser på speciella höjder. Vi arbetar också med metoder för att exakt beskriva säkra driftsförhållanden för flygprogramvara som förlitar sig på sensordata.
Sensorer misslyckas, men även när det händer, automatiserade system kan vara säkrare och effektivare än mänskliga piloter. När flygningen blir mer automatiserad och allt mer beroende av sensorer, det är absolut nödvändigt att flygsystem korskontrollerar data från olika sensortyper, för att skydda mot annars potentiellt dödliga sensorfel.
Den här artikeln är återpublicerad från The Conversation under en Creative Commons-licens. Läs originalartikeln.