En berömd viral video om DARPA Robotics Challenge visar alla typer av humanoida robotar som klumpigt faller ner. Bipedala rörelser är ganska instabila, vilket inte bara är ett problem för en robot som försöker slutföra sin uppgift, men också för att fall kan skada en mycket dyr maskin.
Robotiker över hela världen tar itu med detta problem på en mängd olika sätt. Medan vissa försöker lägga till en rad korrigerande steg efter att en robot hamnar ur balans, ungefär som en person som snubblar efter att ha snubblat, Kris Hauser vill att robotar ska kunna använda miljön runt dem.
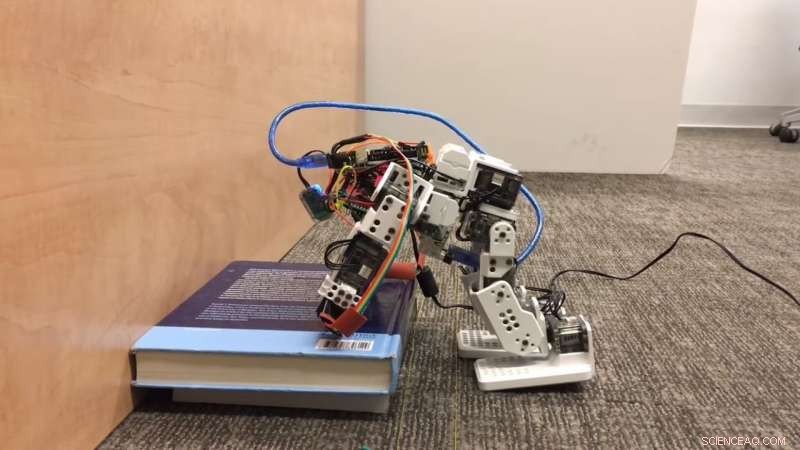
"Om en person blir knuffad mot en vägg eller en skena, de kommer att kunna använda den ytan för att hålla sig upprätt med händerna. Vi vill att robotar ska kunna göra samma sak, sa Kris Hauser, docent i elektro- och datateknik samt i maskinteknik och materialvetenskap vid Duke. "Vi tror att vi är den enda forskargruppen som arbetar med att låta en robot dynamiskt välja var den ska placera sina händer för att förhindra fall."
Även om sådana beslut och handlingar är andra natur för oss, att programmera dem till en robots reflexer är bedrägligt svårt. För att effektivisera processen och spara beräkningstid, Hauser programmerar programvaran så att den bara fokuserar på robotens höft- och axelleder.
Så länge roboten inte vrider sig när den faller, detta skapar bara tre vinklar som stabiliseringsalgoritmen måste ta hänsyn till - foten till höften, höften till axeln, och axeln till handen. Roboten måste identifiera närliggande ytor inom räckhåll och sedan snabbt beräkna den bästa kombinationen av vinklar för att fånga sig själv. Den slutliga lösningen minimerar påverkan när robotens händer kommer i kontakt, och minimerar också risken för att händer eller fötter glider. Algoritmen tar sin bästa gissning och optimerar den sedan gradvis med en metod som kallas direktfotografering.
I sitt nuvarande tillstånd, roboten har information om sin miljö matad till den och kan inte navigera på egen hand. Men inom en snar framtid, Hauser planerar att uppgradera till en större robot med egna kamerasensorer för att låta den se sin omgivning.
"Förhoppningsvis bör vi i slutet av året göra experiment med roboten som faktiskt arbetar i en levande hinderbana, "Då kommer vi att försöka få roboten både dynamiskt att kartlägga vad som finns runt den och resonera kring hur man skyddar sig från att falla i godtyckliga miljöer."