"Precision Jumping Limits from Flight-phase Control in Salto-1P" är den akademiskt klingande titeln på en artikel som ändå borde glädja dem som är intresserade av robotrörelse.
Justin Yim och Ronald Fearing, Institutionen för elektroteknik och datavetenskap, University of California, Berkeley, är tidningens författare. Deras arbete presenterades tidigare denna månad på IROS 2018 i Madrid.
Detta är en monopedal robot, kallas Salto-1P. Videoanteckningar beskrev vidare Salto-1P som en liten monopedal hopprobot som kan kontinuerligt hoppa med hög effekt.
Varför kallar de det Salto? James Holloway in Ny Atlas tillfredsställde den nyfikne. Saltatorial rörelse på terränghinder är svaret, vad "saltatorial" än betyder. Holloway och Google hjälpte till där också.
Saltatoriska medel anpassade till att hoppa. Saltus är ett latinskt ord för språng.
Faktiskt, Att se en enbensrobot hoppa runt i ett oupphörligt frenesi är konstigt nog att nita sig själv. Dock, forskarna vid UC Berkeley hade mer av riktade rörelser i åtanke. Teamet är fixat på att leverera en robot som kan hoppa som gör det rätt för var den landar härnäst.
"Två små propellrar gör att roboten kan vrida sig i luften, men all drivkraft kommer från det enda benet, " sa Hackaday .
Man kan förstå IEEE spektrum valde att kalla det en "robotisk pogostick" (men det är inte historien, det handlar snarare om vad pinnen nu kan åstadkomma). Forskarna var inte intresserade av att bara komma på en hypermaskin som kastade sig omkring.
TechCrunch skrev om dess kapacitet:(1) den kan titta på en yta efter ett mål, skrev John Biggs, och (2) "i huvudsak flyga över dit den behöver landa med hjälp av inbyggda propellrar."
Varför deras senaste arbete är viktigt:Allt handlar om kontrollern, som de uppgraderade för att förbättra precisionen vid landning - "en bedrift som var nästan omöjlig med det tidigare styrsystemet, sa Biggs.
Evan Ackerman förklarade att Salto-1P:s hårdvara är densamma som förra året:ett manövrerat elastiskt ben för humle, "en tröghetssvans som snurrar för att kontrollera tonhöjden, och en halv quadcopter för att kontrollera gir och rullning." Men i år, allt handlar om kontrollern.
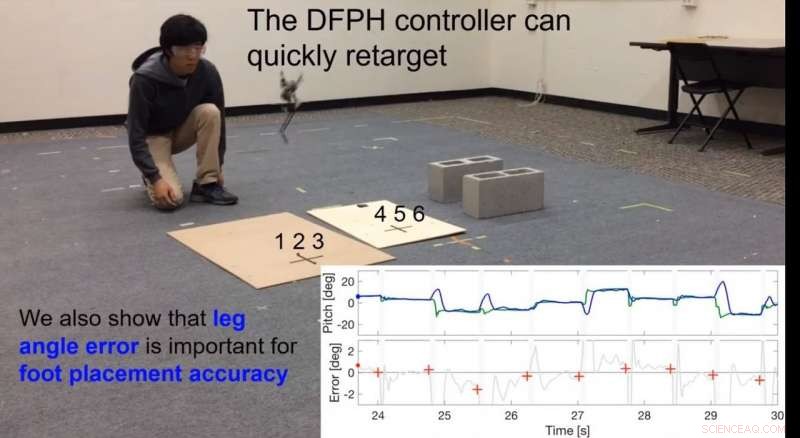
Teamets mål för Salto-1P var en bättre kontrollenhet för att göra saker som kräver exakt fotplacering. Ackerman sa att "ännu mer aggressiva beteenden, som att hoppa mellan väggar, involverar en hel sekvens av hopp som alla måste vara korrekta, eftersom ett enda felaktigt hopp sannolikt kommer att få roboten att falla och krossa sig själv i bitar."
I deras tidning, författarna diskuterade deras deadbeat fotplacering hopping kontroll. Vad betyder det? Väl, de har att göra med "en ny kontrollalgoritm som kan landa Salto-1P:s fot på särskilda ställen på marken som att hoppa på trampstenar eller spela ettbenshopp." De kallar detta "deadbeat foot placement hopping control".
Holloway berättade Ny Atlas läsare om lagets tillvägagångssätt. "Kontrollenheten använder vad som är känt inom matematiken som en Taylor-serie approximation, som kan användas för att approximera svar på komplexa ekvationer, inklusive de styrande krafter som verkar på en punkt."
Slutresultat:en robot konstruerad så att den inte bara kan hoppa utan hoppa mellan angivna platser, "som om man hoppade från trappsteg till trappbräda eller lekte hopscotch." Den kan hoppa på marken, eller mellan föremål med ökande höjd, sa Holloway.
Deras lista över vad som är nästa arbete med denna hoppande robot inkluderar att undersöka effekterna av icke-styv eller sluttande terräng på hoppprestanda och kontrollstrategi. Också, enligt Ackerman, "Vi pratade med Justin Yim på IROS, som berättade för oss att han arbetar för att öka Salto-1P:s hoppprecision ännu mer, samtidigt som den avvänjs från extern lokalisering och datorsystem som håller den instängd inomhus."
© 2018 Tech Xplore