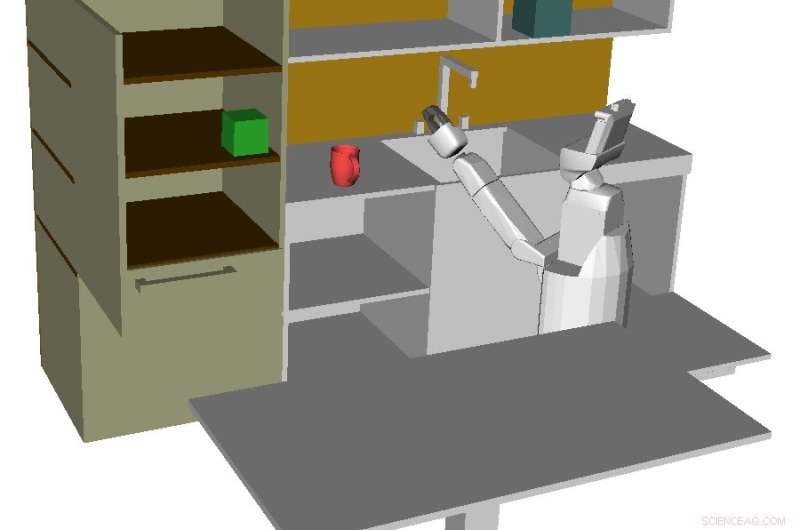
Simuleringsmiljö för en robot där forskarna testade sin algoritm. Kredit:Dai et al.
Forskare vid MIT:s datavetenskap och artificiell intelligens laboratorium har nyligen utvecklat ett slumpmässigt begränsat rörelseplaneringssystem som kan tillämpas på robotar med hög frihetsgrad (DOF) under rörelseosäkerhet och i fall av ofullständig tillståndsinformation. Deras tillvägagångssätt, beskrivs i en tidning som förpublicerats på arXiv, kan hitta genomförbara banor som uppfyller en användarspecificerad gräns över sannolikheten för kollision.
"Den huvudsakliga inspirationen för detta arbete är begränsningen av befintliga rörelseplanerare med begränsad chans, "Siyu Dai, en av forskarna som genomförde studien, berättade för TechXplore. "Jag fick reda på att många toppmoderna rörelseplanerare kräver att hinder formuleras till konvexa former, vilket är omöjligt för planering i högdimensionella domäner, till exempel manipulatorrörelseplanering. Andra vanliga slumpmässiga rörelseplanerare är baserade på snabbt utforskande random tree (RRT) metoder, varav hastigheten i högdimensionell planeringsuppgift är mycket oroande."
För att ta itu med begränsningarna hos befintliga rörelseplaneringssystem, Dai och hennes kollegor siktar på att utveckla en snabbreaktiv och slumpmässig rörelseplanerare. En sådan rörelseplanerare skulle vara särskilt användbar för robotar som utför uppgifter som är föremål för allvarliga störningar och begränsade observationer, såsom undervattensmanipulation.
Probabilistisk Chekov (p-Chekov), systemet de skapade, bygger på deras tidigare arbete med deterministisk rörelseplanering, som integrerade banoptimering i ett sparsamt ramverk för färdplanen. P-Chekov använder en linjär-kvadratisk Gaussisk rörelseplaneringsmetod för att uppskatta en robots sannolikhetsfördelning tillstånd. Den tillämpar sedan kvadraturteorier på uppskattningar av waypointkollisionsrisk och anpassar riskallokeringsmetoder för att tilldela tillåtna sannolikheter för fel till waypoints.
"Det slumpmässiga rörelseplaneringssystemet som utvecklats i vår artikel inkluderar en deterministisk planeringskomponent och en riskbedömningskomponent, " förklarade Dai. "Den deterministiska komponenten konstruerar först en färdplan som består av genomförbara, kollisionsfria kanter baserat på miljöinformationen. I onlineplaneringsuppgifterna, den söker sedan efter en genomförbar bana från färdplanen och jämnar ut den med en banoptimerare. Denna bana överförs sedan till riskbedömningskomponenten, som utvärderar risken för kollision baserat på uppskattning av ljud."
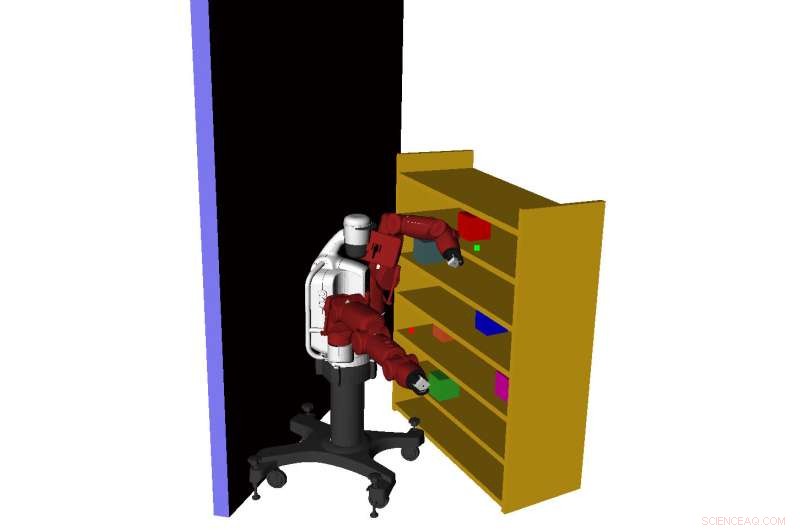
Simuleringsmiljö för en robot där forskarna testade sin algoritm. Kredit:Dai et al.
Om risken för kollision beräknad av P-Chekovs riskbedömningskomponent bryter mot den fördefinierade riskbegränsningen, banan återförs till den deterministiska planeraren och nya begränsningar läggs till, för att hitta en bana med lägre risk. Om risken för kollision uppfyller riskbegränsningen, systemet kör helt enkelt den föreslagna banan.
I motsats till befintliga riskmedvetna rörelseplanerare, P-Chekov kan appliceras på robotplaneringsuppgifter med hög DOF, utan att behöva formulera hinder till konvexa former. I simuleringstester, systemet minskade effektivt riskerna för kollision och tillfredsställde användarspecificerade chansbegränsningar i verkliga planeringsscenarier som ofta stöter på av högdimensionella robotar.
"Vi etablerade ett rörelseplaneringssystem med slumpmässiga begränsningar som kan inkludera högdimensionella rörelseplaneringsuppgifter, ", sa Dai. "Detta betyder att slumpmässig rörelseplanering inte längre är begränsad till köruppgifter, men kan nu appliceras på mobila robotar med armar, till exempel mänskliga stödrobotar och undervattensmanipulatorer, som kan göra planer baserat på olika krav på risknivå."
I framtiden, P-Chekov kan appliceras på en mängd olika högdimensionella robotar, förbättra sin rörelseplanering under osäkerhet. Trots dess lovande resultat, resultaten av systemets planeringsfas kan ibland vara alltför konservativa, på grund av suboptimala riskallokeringar och ett begränsat antal kvadraturnoder.
I preliminära tester, forskarna har redan börjat utvärdera tekniker som kan förbättra systemets användbarhet. Under tiden, de planerar också att förbättra P-Chekovs algoritm för uppskattning av sannolikhet för kollisioner, för att ytterligare öka dess förmåga att undvika konflikter.
"Huvudinriktningen för våra nästa studier kommer att vara att förbättra riskbedömningsalgoritmen för att påskynda hela rörelseplaneringsprocessen och göra planeraren snabbreaktiv, " sa Dai.
© 2018 Science X Network