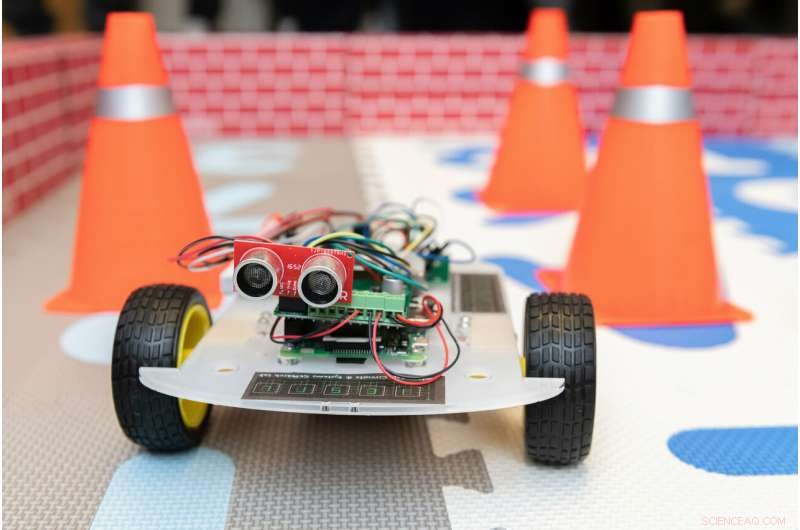
En robotbil som styrs av ett ultralågt hybridchip visas i en arena för att visa sin förmåga att lära sig och samarbeta med en annan robot. Upphovsman:Allison Carter, Georgia Tech
Ett hybridchip med ultralåg effekt inspirerad av hjärnan kan hjälpa till att ge palmstora robotar möjligheten att samarbeta och lära av sina erfarenheter. I kombination med nya generationer av motorer och sensorer med låg effekt den nya applikationsspecifika integrerade kretsen (ASIC)-som arbetar med milliwatt effekt-kan hjälpa intelligenta svärmrobotar att arbeta i timmar i stället för minuter.
För att spara ström, chipsen använder en hybrid digital-analog tidsdomänprocessor i vilken pulsbredden på signaler kodar information. Det neurala nätverket IC rymmer både modellbaserad programmering och samarbetsförstärkningslärande, möjligen ge de små robotarna större kapacitet för spaning, sök-och-räddning och andra uppdrag.
Forskare från Georgia Institute of Technology demonstrerade robotbilar som drivs av de unika ASIC:erna vid IEEE International Solid-State Circuits Conference (ISSCC) 2019. Forskningen sponsras av Defense Advanced Research Projects Agency (DARPA) och Semiconductor Research Corporation (SRC) genom Center for Brain-inspiration Computing Enabling Autonomous Intelligence (CBRIC).
"Vi försöker få intelligens till dessa mycket små robotar så att de kan lära sig om sin miljö och röra sig autonomt, utan infrastruktur, "sa Arijit Raychowdhury, docent i Georgia Tech's School of Electrical and Computer Engineering. "För att uppnå det, vi vill ta med lågeffektkretsbegrepp till dessa mycket små enheter så att de kan fatta beslut på egen hand. Det finns en enorm efterfrågan på mycket små, men kapabla robotar som inte kräver infrastruktur. "
Bilarna demonstrerade av Raychowdhury och doktorander Ningyuan Cao, Muya Chang och Anupam Golder navigerar genom en arena golvad av gummikuddar och omgiven av pappblock. När de söker efter ett mål, robotarna måste undvika trafikkoner och varandra, lära av miljön när de går och kontinuerligt kommunicera med varandra.
Bilarna använder tröghets- och ultraljudssensorer för att bestämma sin plats och upptäcka föremål runt dem. Information från sensorerna går till hybrid ASIC, som fungerar som "hjärnan" för fordonen. Instruktioner går sedan till en Raspberry Pi -kontroller, som skickar instruktioner till elmotorerna.
I palmstora robotar, tre stora system förbrukar kraft:motorerna och kontrollerna som används för att driva och styra hjulen, processorn, och avkänningssystemet. I bilarna byggda av Raychowdhurys team, ASIC med låg effekt innebär att motorerna förbrukar huvuddelen av kraften. "Vi har kunnat trycka ner beräkningskraften till en nivå där budgeten domineras av motorernas behov, " han sa.
Teamet arbetar med kollaboratörer på motorer som använder mikro-elektromekanisk (MEMS) teknik som kan fungera med mycket mindre effekt än konventionella motorer.
"Vi skulle vilja bygga ett system där avkänningskraft, kommunikation och datorkraft, och aktivering är på ungefär samma nivå, i storleksordningen hundratals milliwatt, "sa Raychowdhury, som är ON Semiconductor Docent på skolan för el- och datateknik. "Om vi kan bygga dessa palmstora robotar med effektiva motorer och kontroller, vi bör kunna tillhandahålla flera timmars driftstid på ett par AA -batterier. Vi har nu en bra uppfattning om vilken typ av datorplattformar vi behöver för att leverera detta, men vi behöver fortfarande de andra komponenterna för att komma ikapp. "
I tidsdomänberäkning, information bärs på två olika spänningar, kodas i pulsenas bredd. Det ger kretsarna energieffektivitetsfördelarna med analoga kretsar med robustheten hos digitala enheter.
"Chipsets storlek reduceras med hälften, och strömförbrukningen är en tredjedel av vad ett traditionellt digitalt chip skulle behöva, "sa Raychowdhury." Vi använde flera tekniker i både logik- och minnesdesigner för att minska strömförbrukningen till milliwattintervallet samtidigt som vi uppfyllde målprestanda. "
With each pulse-width representing a different value, the system is slower than digital or analog devices, but Raychowdhury says the speed is sufficient for the small robots. (A milliwatt is a thousandth of a watt).
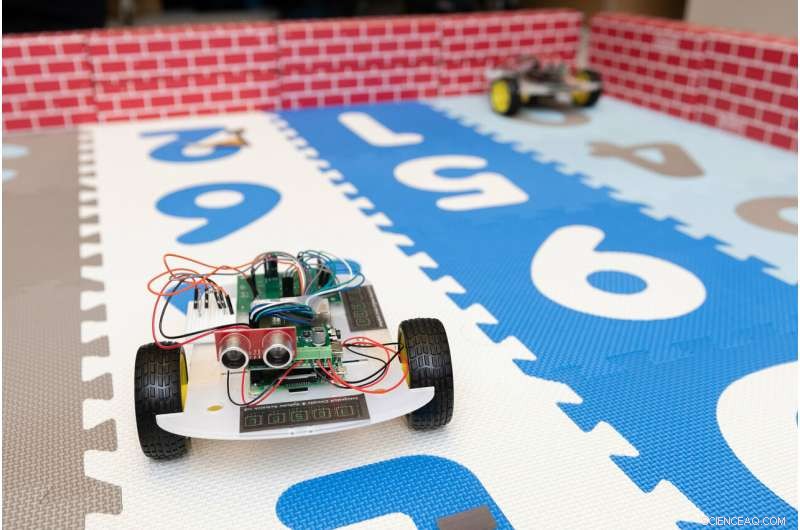
Two robotic cars controlled by an ultra-low power hybrid chip are shown in a test arena where they will demonstrate an ability to learn and collaborate. Upphovsman:Allison Carter, Georgia Tech
"For these control systems, we don't need circuits that operate at multiple gigahertz because the devices aren't moving that quickly, " he said. "We are sacrificing a little performance to get extreme power efficiencies. Even if the compute operates at 10 or 100 megahertz, that will be enough for our target applications."
The 65-nanometer CMOS chips accommodate both kinds of learning appropriate for a robot. The system can be programmed to follow model-based algorithms, and it can learn from its environment using a reinforcement system that encourages better and better performance over time—much like a child who learns to walk by bumping into things.
"You start the system out with a predetermined set of weights in the neural network so the robot can start from a good place and not crash immediately or give erroneous information, " Raychowdhury said. "When you deploy it in a new location, the environment will have some structures that it will recognize and some that the system will have to learn. The system will then make decisions on its own, and it will gauge the effectiveness of each decision to optimize its motion."
Communication between the robots allow them to collaborate to seek a target.
"In a collaborative environment, the robot not only needs to understand what it is doing, but also what others in the same group are doing, " he said. "They will be working to maximize the total reward of the group as opposed to the reward of the individual."
With their ISSCC demonstration providing a proof-of-concept, the team is continuing to optimize designs and is working on a system-on-chip to integrate the computation and control circuitry.
"We want to enable more and more functionality in these small robots, " Raychowdhury added. "We have shown what is possible, and what we have done will now need to be augmented by other innovations."














