SensFoot-enheten. Kredit:Moschetti et al
Forskare vid BioRobotics Institute of Scuola Superiore Sant "Anna, Co-Robotics srl och Sheffield Hallam University har nyligen föreslagit ett nytt tillvägagångssätt för att förbättra interaktionen mellan människor och robotar när de går tillsammans. Deras papper, publicerad i MDPI:er Robotik tidning, föreslår användning av bärbara sensorer som ett sätt att förbättra samarbetet mellan en människa och en robot som rör sig i en delad miljö.
De senaste tekniska framstegen har möjliggjort anställning av robotar som assistenter inom ett brett spektrum av vardagssituationer. För att prestera bra i de flesta av dessa inställningar, dock, robotar ska kunna interagera med mänskliga användare sömlöst och effektivt. Forskare har därför utvecklat metoder och tekniker för att förbättra robotarnas förmåga att förstå sociala signaler och svara därefter.
I sin studie, teamet fokuserade särskilt på uppgifter som involverar människor och robotar som går tillsammans eller utför en uppgift som innebär att stå och röra sig i en delad miljö. Deras mål var att utveckla ett tillvägagångssätt som tillåter människor att röra sig naturligt i ett givet utrymme tillsammans med en robot, utan behov av fysiska kopplingar mellan de två.
"Detta dokument föreslår användning av bärbara tröghetsmåttenheter (IMU) för att förbättra interaktionen mellan människa och robot medan de går tillsammans utan fysiska länkar och utan någon begränsning av den relativa positionen mellan människan och roboten, " skrev forskarna i sin uppsats.
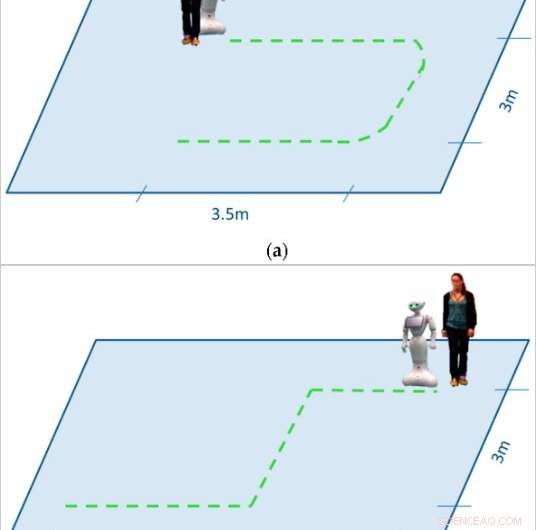
Schema för följande uppgift (a) och följ-mig uppgift (b). Kredit:Moschetti et al.
Det tillvägagångssätt som forskarna föreslår innebär användning av IMU-sensorer, som är elektroniska enheter som mäter och rapporterar orientering, hastighet och andra data som rör rörelser, använder vanligtvis accelerometrar, gyroskop och/eller magnetometrar. Dessa sensorer bärs av människor (t.ex. på deras skor) utan att orsaka dem obehag, så att de kan röra sig fritt i sitt omgivande utrymme.
IMU:erna samlar in realtidsinformation om den mänskliga användarens rörelser och gångrelaterade parametrar (t.ex. gånghastighet, steglängd, orienteringsvinkel, etc.). Senare, denna data bearbetas och används för att forma robotens rörelse, slutligen skapa en mer naturlig interaktion mellan de två agenterna.
Forskarna byggde en prototyp av IMU-system som heter SensFoot och utvärderade dess noggrannhet och effektivitet i en serie experiment som involverade människor och robotar som interagerade med varandra. De rekryterade 19 mänskliga deltagare och bad dem att utföra två olika uppgifter, som de kallar en "följande uppgift" och en "följ-mig" uppgift.
Först, de verifierade noggrannheten i deras system genom att jämföra gånginformationen beräknad av ett referensvisionssystem med den som härleddes från data som samlats in av IMU:erna. Senare, de testade sensorerna i ett verkligt scenario för interaktion mellan människa och robot.
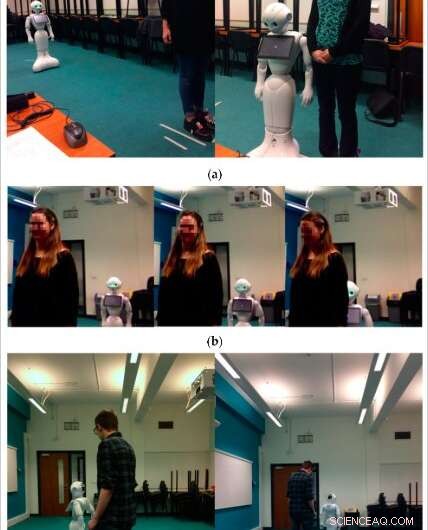
Exempel på tester med användare (a) och sekvenser från följande uppgift (b) och följ mig-uppgift (c). Kredit:Moschetti et al.
"Vi experimenterade med 19 mänskliga deltagare i två olika uppgifter, att tillhandahålla realtidsutvärderingar av gångparametrar för en mobil robot som rör sig tillsammans med en människa, och studerade genomförbarheten och den upplevda användbarheten av deltagarna, "forskarna skrev." Resultaten visar systemets genomförbarhet, som fick positiv feedback från användarna, ge värdefull information för utvecklingen av ett naturligt interaktionssystem, där roboten uppfattar mänskliga rörelser med hjälp av bärbara sensorer. "
De utvärderingar som gjorts av forskarna gav mycket lovande resultat, vilket tyder på att användningen av IMUs avsevärt skulle kunna förbättra interaktionen mellan människor och robotar som rör sig i ett delat utrymme. Dessutom, feedbacken från deltagare som testade sensorerna var överväldigande positiv. I framtiden, det tillvägagångssätt som forskarna föreslagit skulle kunna bana väg för mer adaptiva och effektiva assisterande robotlösningar som involverar integration av IMU eller andra sensorer med maskininlärningsalgoritmer.
"Framtida arbeten handlar om möjligheten att förbättra systemuppfattningen hos den gående användaren, förbättra noggrannheten i extraherade parametrar, och robotens anpassningsförmåga, övervinna de nuvarande begränsningarna i kontroll och integration, " skrev forskarna.
© 2019 Science X Network