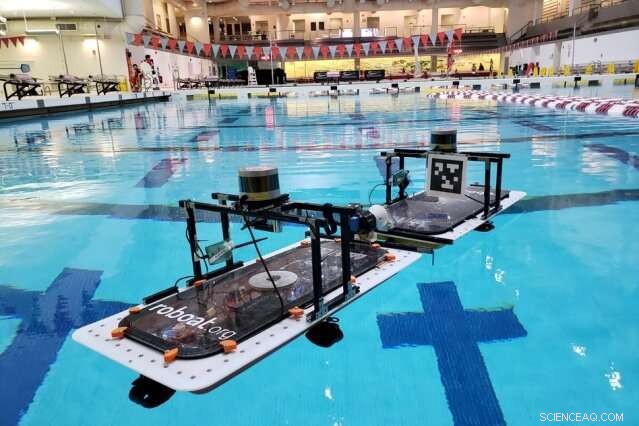
MIT -forskare har gett sin flotta av autonoma "roboats" möjligheten att automatiskt rikta in sig och knäppa fast varandra - och fortsätta försöka om de misslyckas. Roboatsna är utformade för att transportera människor, samla skräp, och självmonteras till flytande strukturer i Amsterdams kanaler. Upphovsman:Massachusetts Institute of Technology
Amsterdam stad föreställer sig en framtid där flottor av autonoma båtar kryssar sina många kanaler för att transportera varor och människor, samla skräp, eller självmonteras till flytande scener och broar. För att främja den visionen, MIT -forskare har gett nya möjligheter till sin flotta av robotbåtar - som utvecklas som en del av ett pågående projekt - som låter dem rikta in sig och knäppa fast varandra, och fortsätt försöka om de misslyckas.
Ungefär en fjärdedel av Amsterdams yta är vatten, med 165 kanaler som slingrar sig vid livliga stadsgator. Många år sedan, MIT och Amsterdam Institute for Advanced Metropolitan Solutions (AMS Institute) samarbetade i projektet "Roboat". Tanken är att bygga en flotta av autonoma robotbåtar - rektangulära skrov utrustade med sensorer, propeller, mikrokontroller, GPS -moduler, kameror, och annan hårdvara - som ger intelligent rörlighet på vattnet för att lindra trängsel i stadens livliga gator.
Ett av projektets mål är att skapa robotenheter som tillhandahåller on-demand-transport på vattenvägar. Ett annat mål är att använda roboatenheterna för att automatiskt bilda "popup" -strukturer, som fotbroar, prestationsstadier, eller till och med matmarknader. Strukturerna kan sedan automatiskt demontera vid bestämda tider och omforma till målstrukturer för olika aktiviteter. Dessutom, Roboatenheterna kan användas som smidiga sensorer för att samla in data om stadens infrastruktur, och luft- och vattenkvalitet, bland annat.
2016, MIT -forskare testade en roboatprototyp som kryssade runt Amsterdams kanaler, går vidare, bakåt, och i sidled längs en förprogrammerad väg. Förra året, forskare utformade billiga, 3D-tryckt, en kvarts version av båtarna, som var effektivare och smidigare, och utrustades med avancerade banor-spårningsalgoritmer.
I ett dokument som presenterades vid den internationella konferensen om robotik och automation, forskarna beskriver roboatenheter som nu kan identifiera och ansluta till dockningsstationer. Kontrollalgoritmer leder roboatsna till målet, där de automatiskt ansluter till en anpassad låsmekanism med millimeter precision. Dessutom, roboten märker om den har missat anslutningen, backar upp, och försöker igen.
Forskarna testade låstekniken i en pool vid MIT och i Charles River, där vattnet är hårdare. I båda fallen, Roboatenheterna kunde vanligtvis ansluta på cirka 10 sekunder, från cirka 1 meter bort, eller de lyckades efter några misslyckade försök. I Amsterdam, systemet kan vara särskilt användbart för skräpsamling över natten. Roboatenheter kunde segla runt en kanal, lokalisera och låsa på plattformar med soptunnor, och för dem tillbaka till insamlingsanläggningar.
"I Amsterdam, kanaler användes en gång för transport och andra saker som vägarna nu används till. Vägar nära kanaler är nu mycket överbelastade - och har buller och föroreningar - så staden vill lägga till mer funktionalitet till kanalerna, "säger författaren Luis Mateos, en doktorand vid institutionen för stadsstudier och planering (DUSP) och en forskare i MIT Senseable City Lab. "Självkörande teknik kan spara tid, kostnader och energi, och förbättra staden framåt. "
"Målet är att använda roboatenheter för att väcka nya möjligheter på vattnet, "tillägger medförfattaren Daniela Rus, chef för datavetenskap och artificiell intelligenslaboratorium (CSAIL) och Andrew och Erna Viterbi professor i elektroteknik och datavetenskap. "Den nya låsmekanismen är mycket viktig för att skapa popup-strukturer. Roboat behöver inte låsas för autonom transport på vatten, but you need the latching to create any structure, whether it's mobile or fixed."
Joining Mateos on the paper are:Wei Wang, a joint postdoc in CSAIL and the Senseable City Lab; Banti Gheneti, a graduate student in the Department of Electrical Engineering and Computer Science; Fabio Duarte, a DUSP and Senseable City Lab research scientist; and Carlo Ratti, director of the Senseable City Lab and a principal investigator and professor of the practice in DUSP.
Making the connection
Each roboat is equipped with latching mechanisms, including ball and socket components, on its front, tillbaka, and sides. The ball component resembles a badminton shuttlecock—a cone-shaped, rubber body with a metal ball at the end. The socket component is a wide funnel that guides the ball component into a receptor. Inside the funnel, a laser beam acts like a security system that detects when the ball crosses into the receptor. That activates a mechanism with three arms that closes around and captures the ball, while also sending a feedback signal to both roboats that the connection is complete.
On the software side, the roboats run on custom computer vision and control techniques. Each roboat has a LIDAR system and camera, so they can autonomously move from point to point around the canals. Each docking station—typically an unmoving roboat—has a sheet of paper imprinted with an augmented reality tag, called an AprilTag, which resembles a simplified QR code. Commonly used for robotic applications, AprilTags enable robots to detect and compute their precise 3-D position and orientation relative to the tag.
Both the AprilTags and cameras are located in the same locations in center of the roboats. When a traveling roboat is roughly one or two meters away from the stationary AprilTag, the roboat calculates its position and orientation to the tag. Vanligtvis, this would generate a 3-D map for boat motion, including roll, pitch, and yaw (left and right). But an algorithm strips away everything except yaw. This produces an easy-to-compute 2-D plane that measures the roboat camera's distance away and distance left and right of the tag. Med hjälp av den informationen, the roboat steers itself toward the tag. By keeping the camera and tag perfectly aligned, the roboat is able to precisely connect.
The funnel compensates for any misalignment in the roboat's pitch (rocking up and down) and heave (vertical up and down), as canal waves are relatively small. Om, dock, the roboat goes beyond its calculated distance, and doesn't receive a feedback signal from the laser beam, it knows it has missed. "In challenging waters, sometimes roboat units at the current one-quarter scale, are not strong enough to overcome wind gusts or heavy water currents, " Mateos says. "A logic component on the roboat says, "You missed, so back up, recalculate your position, and try again.""
Future iterations
The researchers are now designing roboat units roughly four times the size of the current iterations, so they'll be more stable on water. Mateos is also working on an update to the funnel that includes tentacle-like rubber grippers that tighten around the pin—like a squid grasping its prey. That could help give the roboat units more control when, säga, they're towing platforms or other roboats through narrow canals.
In the works is also a system that displays the AprilTags on an LCD monitor that changes codes to signal multiple roboat units to assemble in a given order. I början, all roboat units will be given a code to stay exactly a meter apart. Sedan, the code changes to direct the first roboat to latch. After, the screen switches codes to order the next roboat to latch, och så vidare. "It's like the telephone game. The changing code passes a message to one roboat at a time, and that message tells them what to do, " Mateos says.
Darwin Caldwell, the research director of Advanced Robotics at the Italian Institute of Technology, envisions even more possible applications for the autonomous latching capability. "I can certainly see this type of autonomous docking being of use in many areas of robotic refueling and docking … beyond aquatic/naval systems, " han säger, "including inflight refueling, space docking, cargo container handling, [and] robot in-house recharging."
Denna artikel publiceras på nytt med tillstånd av MIT News (web.mit.edu/newsoffice/), en populär webbplats som täcker nyheter om MIT -forskning, innovation och undervisning.