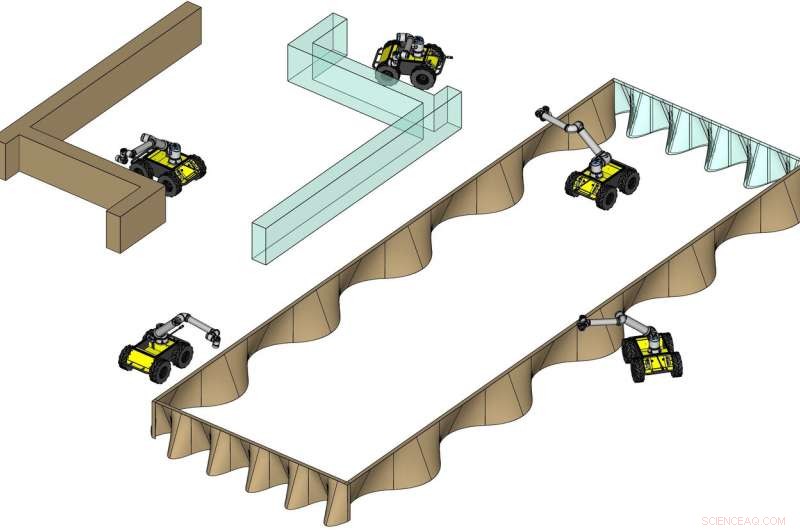
Ett multidisciplinärt robotteam bestående av professorer vid NYU Tandon School of Engineering designar kontrollsystem för 3D-skrivare på robotarmar ovanpå mobilen, rörliga plattformar. Fungerar i team -- ett koncept som kallas collective additive manufacturing (CAM) -- dessa skrivare, med maskininlärning och andra funktioner för artificiell intelligens (AI), skulle kunna reparera medborgerliga strukturer; arbete i havsdjup och katastrofområden; eller till och med bege dig till rymden för att arbeta på månen, Mars, och vidare. Upphovsman:NYU Tandon
Kommersiell 3-D-utskrift – eller additiv tillverkning (AM) – är en blomstrande industri. Men om skrivare befriades från den typiska installationen som involverade en orörlig låda och en portal, och frigöras att arbeta i roving, samarbetsgrupper, AM-verksamheten kan vara mycket större med många fler applikationer, bland annat som robotmurare på byggarbetsplatser och reparation av sönderfallande civil infrastruktur i städer och på landsbygden.
Ett multidisciplinärt robotteam vid NYU Tandon School of Engineering, värd av NYU:s Center for Urban Science and Progress (CUSP) och stöds av ett anslag på 1,2 miljoner USD från National Science Foundation (NSF), arbetar för att göra konceptet till verklighet genom att designa autonoma system för 3-D-skrivare på robotarmar kopplade till mobilen, svängande plattformar. Fungerar i team – ett koncept som kallas collective additive manufacturing (CAM) – dessa skrivare, med maskininlärning och andra funktioner för artificiell intelligens (AI), kunde reparera broar, tunnlar och andra medborgarstrukturer; arbete i havsdjup och katastrofzoner; eller till och med bege dig till rymden för att arbeta på månen, Mars, och vidare.
Forskarna, Chen Feng, Maurizio Porfiri, Ludovic Righetti, och Weihua Jin, professorer vid institutionerna för samhällsbyggnad och stadsteknik, Mekanisk och rymdteknik, och elektro- och datateknik, kommer att fokusera på tre områden som är avgörande för att göra 3D-CAM-team livskraftiga:autonomi, kontrollera, realtidssystem och nätverk:
Feng förklarade att målet är noggrannhet, effektivitet, och anpassningsförmåga till miljön och till realtidsförhållanden-snarare hur en navigationsapp omdirigerar ett fordon som det känner har avvikit från en kartlagt kurs. Till skillnad från den typiska GPS-baserade navigationstjänsten, dock, justeringarna måste vara blixtsnabba och exakta till några millimeter, inte ett par dussin fot. Han tillade att teamets unika kombination av expertis inom robotik, artificiell intelligens, kontrollteori, och dynamiska system gör utmaningarna överkomliga.
Feng kommer att fokusera på planering och lokalisering, hantera sådana utmaningar som hur roboten ska kunna identifiera när och när den inte behöver en hög grad av precision för att lokalisera sig själv.
"Roboten måste kunna förflytta sig snabbt till utskriftsområdet, observera de verkliga förhållandena - till exempel ojämn mark, eftersom den verkliga världen inte är plan – gör kompensationer omedelbart, " sa han. "Och även om vi vill ha en högre grad av noggrannhet i strukturområdet, ju längre du är från struktur desto mindre behöver du, "förklarade han." Detta kommer att innebära en ny typ av proaktiv lokalisering. "
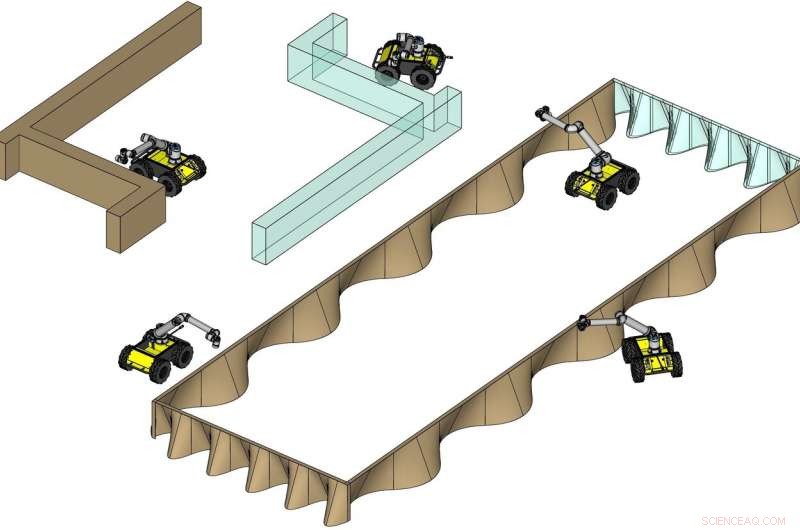
NYU Tandon professorer Chen Feng, Ludovic Righetti och Maurizio Porfiri designar system för kollektiv additiv tillverkning, där team av mobila 3D-utskriftsrobotar arbetar tillsammans för att reparera eller bygga strukturer, eller till och med arbeta på månen eller Mars. Kredit:NYU Tandon
Righetti kommer att arbeta med optimala algoritmer i realtid för varje mobilskrivare, för att roboten snabbt ska kunna anpassa sig till miljön.
"Varje robot måste observera vad som skrivs ut, självständigt associera det med projektdesignen, och omedelbart känna igen om den tryckta strukturen har avvikit från den, och med hur mycket, och hela tiden bestämma vad som är de näst bästa åtgärderna för att säkerställa korrekt utskrift av strukturen, " han sa.
Porfiri kommer att utveckla ett matematiskt ramverk för att tillåta robotarna att autonomt koordinera sina respektive handlingar inom den utvecklande fysiska miljön, gör det möjligt för flera mobila skrivare att samtidigt skapa en struktur med högre effektivitet. Denna förmåga skulle vara särskilt viktig på platser som Mars där det inte finns någon fjärrserver tillräckligt nära för att kontrollera robotarnas samordnade ansträngningar utan tidsfördröjning.
"Till skillnad från drönare som flyger i form eller autonoma bilar som håller avstånd från varandra, våra mobila skrivare lämnar ett unikt fotavtryck i den fysiska miljön:objektet som skrivs ut. Mitt arbete kommer att utnyttja just detta fotavtryck för att etablera effektiva algoritmer för koordinering och kollektivt tryck."
Jin kommer att hjälpa teamet att utveckla nya kompositmaterial lämpliga för mobil 3-D betongtryck. Teamet planerar att demonstrera effektiviteten hos algoritmerna genom 3D-utskrift i verkliga världen av de nya betongerna som använder mobila skrivare som de kommer att bygga på NYU Tandon.
"För att frigöra den fulla potentialen av kollektiv additiv tillverkning, flera vetenskapliga gränser måste flyttas, säkerställa optimal distribution av flera mobila robotar som skriver ut stora strukturer enligt en konstruerad, virtuell design, sa Feng.
Projektet inkluderar en industriworkshop om CAM, en offentlig utomhusutställning, prisvärt/öppet utbildningspaket på CAM, K-12 CAM-tävling i stationär skala, entreprenörsverksamhet och en mångfaldsinsats för studenter med alla bakgrunder.