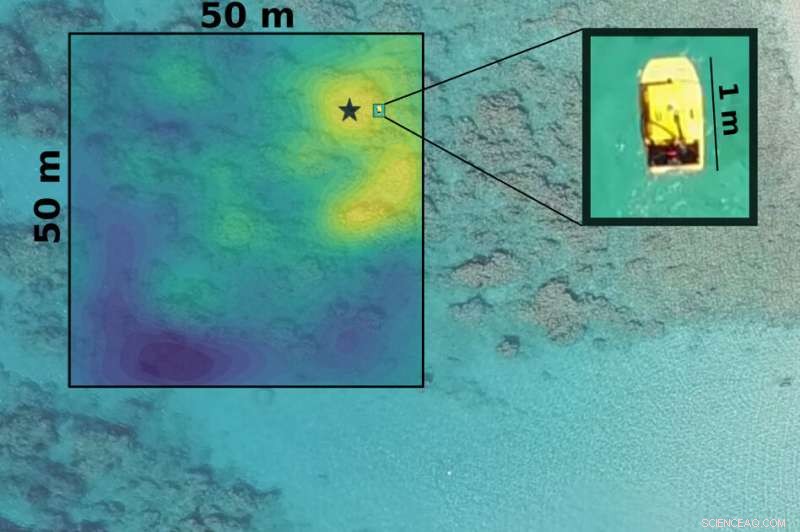
Även i outforskade vatten, ett MIT-utvecklat robotsystem kan effektivt sniffa upp värdefulla, svåra att hitta platser att samla prover från. När det implementeras i autonoma båtar utplacerade utanför Barbados kust (bilden), systemet hittade snabbt det mest exponerade korallhuvudet - vilket betyder att det var beläget på den grundaste platsen - vilket är användbart för att studera hur solexponering påverkar korallorganismer. Kredit:Massachusetts Institute of Technology
Ett autonomt robotsystem uppfunnit av forskare vid MIT och Woods Hole Oceanographic Institution (WHOI) sniffar effektivt upp de mest vetenskapligt intressanta – men svåra att hitta – provtagningsplatserna i stora, outforskade vatten.
Miljövetare är ofta intresserade av att samla prover på de mest intressanta platserna, eller "maxima, " i en miljö. Ett exempel kan vara en källa till läckande kemikalier, där koncentrationen är högst och mestadels oförstörd av yttre faktorer. Men ett maximum kan vara vilket kvantifierbart värde som helst som forskare vill mäta, såsom vattendjup eller delar av korallrevet som är mest exponerade för luft.
Ansträngningar för att distribuera robotar som söker maximalt lider av effektivitets- och noggrannhetsproblem. Vanligen, robotar kommer att röra sig fram och tillbaka som gräsklippare för att täcka ett område, vilket är tidskrävande och samlar många ointressanta prover. Vissa robotar känner av och följer spår med hög koncentration till sin läckakälla. Men de kan bli vilseledda. Till exempel, kemikalier kan fastna och samlas i springor långt från en källa. Robotar kan identifiera dessa högkoncentrationsfläckar som källan men inte vara i närheten.
I ett dokument som presenterades vid den internationella konferensen om intelligenta robotar och system (IROS), forskarna beskriver "PLUMMER, " ett system som gör det möjligt för autonoma mobila robotar att nollställa ett maximum mycket snabbare och mer effektivt. PLUMES utnyttjar probabilistiska tekniker för att förutsäga vilka vägar som sannolikt leder till det maximala, när du navigerar över hinder, skiftande strömmar, och andra variabler. När den samlar in prover, den väger vad den har lärt sig för att avgöra om man ska fortsätta på en lovande väg eller söka det okända – som kan hysa mer värdefulla prover.
Viktigt, PLUMES når sin destination utan att någonsin bli instängd i de där knepiga högkoncentrationsställena. "Det är viktigt, för det är lätt att tro att man har hittat guld, men du har verkligen hittat dårarnas guld, " säger den första författaren Victoria Preston, en Ph.D. student i datavetenskap och artificiell intelligens Laboratory (CSAIL) och i MIT-WHOI Joint Program.
Forskarna byggde en PLUMES-driven robotbåt som framgångsrikt upptäckte det mest exponerade korallhuvudet i Bellairs Fringing Reef i Barbados – vilket betyder, den låg på den grundaste platsen – vilket är användbart för att studera hur solexponering påverkar korallorganismer. I 100 simulerade försök i olika undervattensmiljöer, en virtuell PLUMES-robot samlade också konsekvent in sju till åtta gånger fler prover av maxima än traditionella täckningsmetoder inom tilldelade tidsramar.
"PLUMES gör den minimala mängd utforskning som krävs för att hitta det maximala och koncentrerar sig sedan snabbt på att samla in värdefulla prover där, " säger medförfattaren Genevieve Flaspohler, en Ph.D. student och i CSAIL och MIT-WHOI Joint Program.
Med Preston och Flaspohler på tidningen är:Anna P.M. Michel och Yogesh Girdhar, båda forskare vid institutionen för tillämpad havsfysik och teknik vid WHOI; och Nicholas Roy, professor i CSAIL och vid Institutionen för flyg- och astronautik.
Navigera i en exploatering-utforska avvägning
En viktig insikt hos PLUMES var att använda tekniker från sannolikhet till resonemang för att navigera i den notoriskt komplexa kompromissen mellan att utnyttja det man lärt sig om miljön och att utforska okända områden som kan vara mer värdefulla.
"Den stora utmaningen i maximalt sökande är att låta roboten balansera utnyttjande av information från platser som den redan vet har höga koncentrationer och utforska platser som den inte vet mycket om, " säger Flaspohler. "Om roboten utforskar för mycket, det kommer inte att samla in tillräckligt med värdefulla prover maximalt. Om den inte utforskar tillräckligt, det kan missa maximalt helt."
Har hamnat i en ny miljö, en PLUMES-driven robot använder en probabilistisk statistisk modell som kallas en Gauss-process för att göra förutsägelser om miljövariabler, som kemiska koncentrationer, och uppskatta avkänningsosäkerheter. PLUMES genererar sedan en fördelning av möjliga vägar som roboten kan ta, och använder de uppskattade värdena och osäkerheterna för att rangordna varje väg efter hur väl den tillåter roboten att utforska och utnyttja.
I början, PLUMES kommer att välja vägar som slumpmässigt utforskar miljön. Varje prov, dock, ger ny information om målvärdena i den omgivande miljön – till exempel platser med högsta koncentrationer av kemikalier eller grundaste djup. Den Gaussiska processmodellen utnyttjar denna data för att begränsa möjliga vägar som roboten kan följa från sin givna position för att ta prov från platser med ännu högre värde. PLUMES använder en ny objektiv funktion - som vanligtvis används i maskininlärning för att maximera en belöning - för att ringa om roboten ska utnyttja tidigare kunskap eller utforska det nya området.
"Hallucinerande" stigar
Beslutet var nästa prov ska samlas in beror på systemets förmåga att "hallucinera" alla möjliga framtida åtgärder från sin nuvarande plats. Att göra så, den använder en modifierad version av Monte Carlo Tree Search (MCTS), en vägplaneringsteknik populär för att driva system med artificiell intelligens som behärskar komplexa spel, som Go och Chess.
MCTS använder ett beslutsträd – en karta över anslutna noder och linjer – för att simulera en väg, eller sekvens av rörelser, behövs för att nå en slutgiltig vinnande handling. Men i spel, utrymmet för möjliga vägar är ändligt. I okända miljöer, med föränderlig dynamik i realtid, utrymmet är faktiskt oändligt, gör planering extremt svår. Forskarna designade "continuous-observation MCTS, " som utnyttjar den Gaussiska processen och den nya objektiva funktionen för att söka över detta svårhanterliga utrymme av möjliga verkliga vägar.
Roten till detta MCTS-beslutsträd börjar med en "tro"-nod, vilket är nästa omedelbara steg som roboten kan ta. Denna nod innehåller hela historien om robotens handlingar och observationer fram till dess. Sedan, systemet expanderar trädet från roten till nya linjer och noder, se över flera steg av framtida åtgärder som leder till utforskade och outforskade områden.
Sedan, systemet simulerar vad som skulle hända om det tog ett prov från var och en av de nygenererade noderna, baserat på några mönster som den har lärt sig från tidigare observationer. Beroende på värdet på den slutliga simulerade noden, hela vägen får en belöningspoäng, med högre värden som motsvarar mer lovande handlingar. Belöningspoäng från alla banor rullas tillbaka till rotnoden. Roboten väljer den väg som ger högst poäng, tar ett steg, och samlar in ett riktigt prov. Sedan, den använder verkliga data för att uppdatera sin Gaussiska processmodell och upprepar "hallucinationsprocessen".
"Så länge systemet fortsätter att hallucinera att det kan finnas ett högre värde i osynliga delar av världen, den måste fortsätta utforska, " säger Flaspohler. "När den äntligen konvergerar på en plats uppskattar den vara den maximala, eftersom det inte kan hallucinera ett högre värde längs vägen, den slutar sedan utforska."
Nu, forskarna samarbetar med forskare vid WHOI för att använda PLUMES-drivna robotar för att lokalisera kemiska plymer vid vulkaniska platser och studera metanutsläpp i smältande kustflodmynningar i Arktis. Forskare är intresserade av källan till kemiska gaser som släpps ut i atmosfären, men dessa testplatser kan sträcka sig över hundratals kvadratkilometer.
"De kan [använda PLUMMER för att] spendera mindre tid på att utforska det enorma området och verkligen koncentrera sig på att samla in vetenskapligt värdefulla prover, " säger Preston.
Den här historien återpubliceras med tillstånd av MIT News (web.mit.edu/newsoffice/), en populär webbplats som täcker nyheter om MIT-forskning, innovation och undervisning.