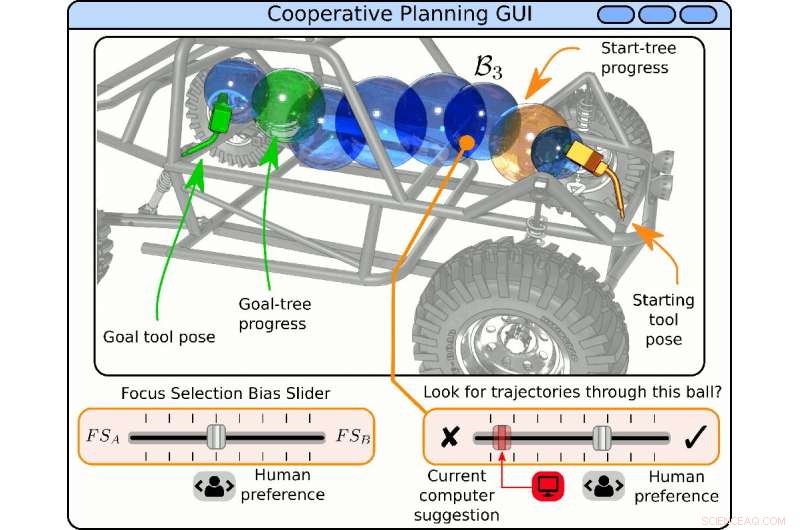
Den här bilden visar ett grafiskt användargränssnitt med kooperativ planering, som applicerat i en svetsinställning för rullburenhet. vägplaneraren får initialt i uppgift att flytta svetsverktyget från "startverktygsställning" till "målverktygsställning". Om vägplaneraren stöter på svårigheter att ta fram en lösning, det meddelar de mänskliga operatörerna, som sedan kommer att skapa en rad bollar som utgör en ledtråd om hur roboten ska gå från "startverktygsposition" till "målverktygsposition". Mänskliga operatörer kan flytta bollarna, ändra storlek på bollarna och deformera i huvudsak bollsträngen tills banplaneraren kan utnyttja de givna tipsen. Upphovsman:pradeep rajendran.
Forskare vid USC Viterbi Center for Advanced Manufacturing identifierar en algoritm för att optimera robotar för att ge korta, kollisionsfria lösningar i komplexa tillverkningsutrymmen.
Föreställ dig en bilmonteringsanläggning:tusentals upprepade uppgifter måste utföras dagligen, som att sätta in en ratt i en bil. När roboten väl har lärt sig den bästa banan för att komma från punkt A (där hjulen staplas) till punkt B (där hjulet måste sättas in), den kan köras på detta miljontals gånger, utan misstag eller kollisioner.
Dock, om denna uppgift ändras till och med något - till exempel att öka hjulstorleken - kommer roboten inte att kunna slutföra uppgiften.
För att hjälpa robotar att tillhandahålla högkvalitativa lösningar även i komplexa tillverkningsscenarier, forskare från USC Viterbi School of Engineering Center for Advanced Manufacturing (CAM) identifierade ett nytt tillvägagångssätt för att automatisera robotars vägar genom sina arbetsytor. I forskning som presenterades vid den internationella konferensen om intelligenta robotar och system den 4 november, 2019 i Macau, Kina, forskargruppen, inklusive professor SK Gupta, Smith International Professor in Mechanical Engineering and CAM director, och Ph.D. kandidat Pradeep Rajendran, föreslog en ny vägplaneringsalgoritm och gränssnitt som vägleder robotar att ta den kortaste, snabbaste vägen från en källpunkt till en målpunkt i en arbetsyta med minimal mänsklig input.
"Vi föreslår ett tillvägagångssätt för att framkalla mänsklig feedback under den automatiska vägplaneringen för manipulatorer som arbetar i mycket komplexa arbetsytor - till exempel satellitmonteringsoperationer, "Sa Rajendran." Normalt sett robotoperatörer använder en automatisk vägplanerare för att planera en bana för roboten för att slutföra uppgiften inom arbetsytan. Om vägplanering misslyckas - vilket innebär att den föreslagna banan inte ger önskat resultat - måste robotoperatörerna manuellt mata in vägpunkter - specifika punkter längs banan för att leda roboten från dess källa till dess destination. "
Denna situation uppstår oftare i komplexa eller begränsade arbetsytor, som satellitmonteringsoperationen, där svårare arbetsyt geometrier, fysiska hinder och tätare ändringar eller anpassningar kräver att robotar utför komplexa vägar. Som ett resultat, robotoperatörer slösar bort värdefull tid manuellt med information för varje scenario, besegra syftet med att använda automatisering i första hand.
Algoritmen fungerar genom att tillhandahålla ett användarvänligt gränssnitt för roboten för att samla in mänsklig operatörsinmatning tidigt i banplaneringen-processen att kartlägga den väg som roboten bör ta genom arbetsplatsen för att utföra sin uppgift. Den mänskliga operatören larmas, genom visuella signaler i programmet, till de mer komplexa områden som roboten kommer att behöva navigera och kan ge information i enlighet därmed, att ta fram direktiv på hög nivå. Som ett resultat, när roboten stöter på små förändringar i sin uppgift - som den tidigare nämnda hjulstorleksökningen - kommer den att kunna dra nytta av dessa direktiv och anpassa sin väg därefter.
Metoden som utarbetats av forskare vid USC Viterbis avdelning för rymd- och maskinteknik-som också omfattar postdoktoral forskningsassistent Ariyan Kabir, Ph.D. student Shantanu Thakar och CAM -forskare Brual Shah - prioriterar automatisering, se till att vägplaneringsprogrammet bara får hjälp när det behövs. Det tar vanligtvis 15 till 30 minuter att ange en sökväg manuellt. med sökvägsplaneringsalgoritmen, sökvägen kan genereras inom några sekunder.
"Vid tillverkning av små volymer, robotar utför många icke-repetitiva uppgifter som ändras ofta. Att programmera robotar för var och en av dessa iterationer av uppgifter är inte bara tidskrävande, det är tråkigt och ineffektivt, "Sa Rajendran." Med den här nya algoritmen, vi visar att många icke-repetitiva processer som uppstår i tillverkningsapplikationer med liten volym enkelt kan automatiseras, med minimal input från mänskliga operatörer. "














