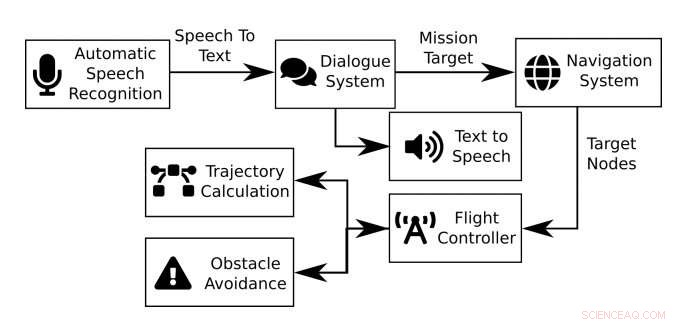
En översikt över systemet. Kredit:Fuhrman et al.
Forskare vid Karlsruhe Institute of Technology i Tyskland har nyligen utvecklat en interaktiv drönare designad för att hjälpa människor i inomhusmiljöer som kontor eller laboratorier. I en tidning förpublicerad på arXiv, forskarna presenterade resultaten av deras drönare när de utförde enkla uppgifter i laboratoriet.
"I det här pappret, vi presenterar en drönarassistent för inomhuskontor som har till uppgift att göra ärenden och utföra enkla uppgifter på vårt laboratorium, samtidigt som de ges instruktioner från och interagerar med människor i rymden, " skrev forskarna i sin uppsats.
Metoden för att designa drönaren som antagits av forskarna är centrerad kring begreppet "uppdrag, " vilket innebär att ta emot indataparametrar och uppfylla framgångsrika villkor, eller "mål". För att framgångsrikt slutföra ett uppdrag, deras drönare ska kunna uppnå alla mål som är förknippade med den.
"I fallet med det system som presenteras i detta dokument, ingångsparametern är en verbal begäran om att flyga till en viss destination (rum eller person) i en kontorsmiljö, "förklarade forskarna i sin uppsats." Målet med uppdraget är att nå målet utan några manuella ingrepp och kollision med statiska eller dynamiska hinder. "
Den interaktiva drönaren som presenteras av forskarna är en modifierad version av Crazyflie 2.0-drönaren, designad av ett företag som heter Bitcraze. Den har flera komponenter:ett undersystem för automatisk taligenkänning (ASR) som transkriberar en användares verbala förfrågningar; ett dialogsystem som tar emot dessa förfrågningar, bearbetar dem och identifierar målet inom kontoret, och en flygkontrollör som planerar drönarens bana till önskat mål medan han försöker undvika kollisioner med hinder.
Forskarna bestämde sig för att utvärdera var och en av systemets komponenter separat för att tydligt identifiera funktioner som behövde förbättras. För att utvärdera dialogsystemet, de bad tre personer som inte har engelska som modersmål att ge enkla verbala instruktioner högt, till exempel, beordrar drönaren att flyga till ett annat rum eller besöka en annan person i labbet.
Senare, forskarna testade deras drönares djupuppfattning och förmåga att undvika kollisioner genom att presentera drönaren med tre olika typer av hinder:en stängd dörr, en person, och en metallbänk. Till sist, de undersökte i vilken takt deras system kunde genomföra uppdrag framgångsrikt genom att skicka det till olika målrum med hjälp av skriftliga instruktioner.

En av Crazylife-drönarna som forskarna använder. Upphovsman:Fuhrman et al.
Medan, drönaren befanns slutföra uppdrag med en framgångsfrekvens på 77,78 procent, de fann att det hade flera begränsningar. Till exempel, en av de vanligaste orsakerna till misslyckande i uppdraget var att drönaren vred sig något under starten, eftersom dess fyra propellrar började fungera vid något olika tidpunkter.
"Eftersom detta är vår första prototyp, det finns gott om utrymme för framtida förbättringar, inte bara på var och en av de enskilda komponenterna utan även på systemet som helhet, " sa forskarna.
Teamet observerade att drönarens dialogsystem fungerade särskilt dåligt och kunde förstå en persons instruktioner i 57 procent av fallen i bästa fall. Huvudproblemet med dialogsystemet var att ASR gav svårigheter att identifiera personers namn när de uttalades av användare, därmed avbryter taligenkänningsprocessen för tidigt.
"I framtida arbete, vi vill använda ett förbättrat ARS-system, " skrev forskarna i sin uppsats. "Dessutom, för att tillåta ett större utbud av naturligt språk utan att öka storleken på träningsdatauppsättningen, vi vill också använda en multi-task-strategi. Det betyder att drönardataset kommer att tränas tillsammans med en datauppsättning utanför domänen."
I de inledande testerna, drönarens kollisionsdetekteringskomponent fungerade anmärkningsvärt bra, effektivt förhindrar kollisioner med både människor och stora föremål i de flesta fall. Dock, det visade sig kämpa med att upptäcka mycket tunna eller genomskinliga möbler. För att övervinna denna begränsning, teamet planerar nu att skapa en mer exakt, realtidskarta över den omgivande miljön, som för närvarande, systemet baserar sina förutsägelser på en förinspelad 2D-karta.
"Att minska positionsfel bör också bidra till att förbättra vår totala framgångsfrekvens för uppdrag, eftersom detta var en av huvudorsakerna till misslyckande i uppdraget under våra tester, "förklarade forskarna i sin uppsats." Det andra problemet som uppstod under våra tester var djupuppfattningssystemet som fungerade dåligt under mycket ljusa eller förändrade ljusförhållanden. Vi planerar att också ta itu med dessa frågor i framtiden."
Dessutom, i sina nästa studier, forskarna skulle vilja förbättra systemets batteritid och batterihantering, som för tillfället, den kan bara slutföra tre eller fyra uppdrag innan den måste laddas om. De skulle så småningom vilja öka detta antal avsevärt, samtidigt som de kommer med nya lösningar som kan hjälpa till att lindra detta problem.
© 2019 Science X Network