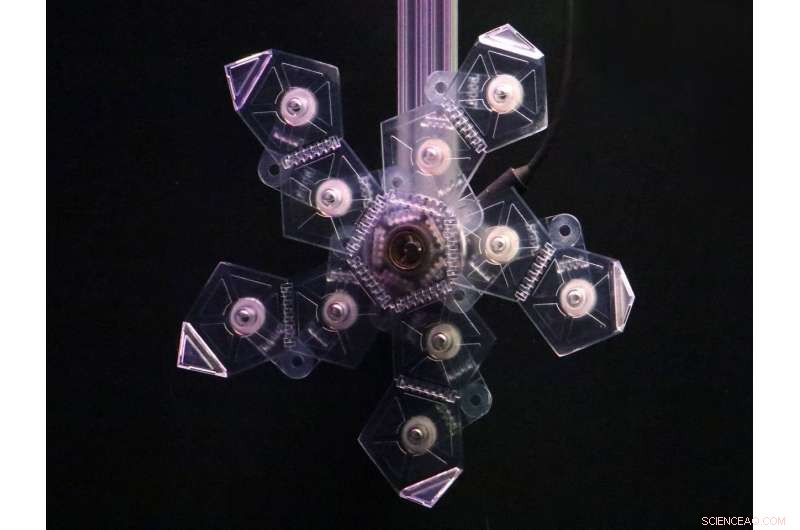
RAD vecklas ut. Kredit:Wyss Institute vid Harvard University
Det öppna havet är den största och minst utforskade miljön på jorden, uppskattas innehålla upp till en miljon arter som ännu inte har beskrivits. Dock, många av dessa organismer är mjuka – som maneter, bläckfisk, och bläckfiskar – och är svåra att fånga för studier med befintliga undervattensverktyg, som alltför ofta skadar eller förstör dem. Nu, en ny enhet utvecklad av forskare vid Harvard Universitys Wyss Institute, John A. Paulson School of Engineering and Applied Sciences (SEAS), och Radcliffe Institute for Advanced Study fångar säkert känsliga havsdjur inuti ett vikbart polyedriskt hölje och låter dem gå utan skada med hjälp av en roman, origami-inspirerad design. Forskningen redovisas i Vetenskapsrobotik .
"Vi närmar oss dessa djur som om de vore konstverk:skulle vi skära ut bitar ur Mona Lisa för att studera den? Nej, vi skulle använda de mest innovativa verktygen som finns. Dessa djuphavsorganismer, vissa är tusentals år gamla, förtjänar att bli behandlad med en liknande mildhet när vi interagerar med dem, " sa den samarbetande författaren David Gruber, Ph.D., som är en Radcliffe Fellow 2017-2018, National Geographic Explorer, och professor i biologi och miljövetenskap vid Baruch College, KULIG.
Idén att tillämpa vikningsegenskaper på insamling av undervattensprov började 2014 när första författaren Zhi Ern Teoh, Ph.D. tog en klass av Chuck Hoberman, FRÖKEN., en Wyss Associate Faculty Member och Pierce Anderson-lektor i designteknik vid Harvard Graduate School of Design, om att skapa vikmekanismer genom beräkningsmetoder. "Jag byggde mikrorobotar för hand i forskarskolan, vilket var mycket mödosamt och tråkigt arbete, och jag undrade om det fanns ett sätt att vika en plan yta till en tredimensionell form med hjälp av en motor istället, sa Teoh, en före detta Wyss postdoktor i Robert Woods labb, Ph.D., som nu är ingenjör på Cooper Perkins.
En kollega i Wood-labbet vid den tiden, Brennan Phillips, Ph.D. - nu biträdande professor i havsteknik vid University of Rhode Island - såg Teohs design och föreslog att han skulle anpassa den för att fånga havsdjur, som är notoriskt svåra att få tag på med befintlig undervattensutrustning som till stor del är designad för det grova arbetet med havsbrytning och konstruktion.
Enheten som Teoh byggde består av fem identiska 3-D-tryckta polymer-"kronblad" fästa på en serie roterande fogar som är sammanlänkade för att bilda en ställning. När en enda motor applicerar ett vridmoment till den punkt där kronbladen möts, det får hela strukturen att rotera runt sina leder och vikas upp till en ihålig dodekaeder (som en tolvsidig, nästan rund låda), ger den namnet Rotary Actuated Dodecahedron (RAD). Vikningen är helt och hållet styrd av utformningen av lederna och formen på själva kronbladen; ingen annan inmatning krävs.
Teamet testade RAD-provtagaren på Mystic Aquarium i Mystic, CT och framgångsrikt samlade och släppte månmaneter under vattnet. Efter att ha gjort modifieringar av provtagaren så att den kunde motstå öppet hav, de monterade den sedan på ett undervattens fjärrstyrt fordon (ROV) från Monterey Bay Aquarium Research Institute (MBARI) i Monterey, CA och testade den i fält på djup av 500-700 m (1, 600-2, 300 fot) med hjälp av ROV:s manipulatorarm och människokontrollerade joystick för att styra provtagaren. Teamet kunde fånga mjuka organismer som bläckfisk och maneter i deras naturliga livsmiljöer, och släpp dem utan skada.
"RAD-provtagarens design är perfekt för den svåra miljön i djuphavet eftersom dess kontroller är mycket enkla, så det finns färre element som kan gå sönder. Det är också modulärt, så om något går sönder, vi kan helt enkelt byta ut den delen och skicka tillbaka provtagaren ner i vattnet, ", sa Teoh. "Denna vikbara design är också väl lämpad att användas i rymden, som liknar djuphavet genom att det är en låg gravitation, ogästvänlig miljö som gör det svårt att använda vilken enhet som helst."
Teoh och Phillips arbetar för närvarande på en mer robust version av RAD-provtagaren för användning i tyngre undervattensuppgifter, som marin geologi, medan Gruber och Wood fokuserar på att ytterligare förfina samplerns mer känsliga förmågor. "Vi skulle vilja lägga till kameror och sensorer till provtagaren så att i framtiden, vi kan fånga ett djur, samla in massor av data om det som dess storlek, materialegenskaper, och till och med dess genom, och släpp det sedan, nästan som en undervattensutomjordisk bortförande, sa Gruber.

RAD:n monterad på ett undervattensfordon. Kredit:Wyss Institute vid Harvard University
"Vår grupps samarbete med marinbiologiska samfundet har öppnat dörren för områdena mjuk robotik och origami-inspirerad teknik för att tillämpa dessa teknologier för att lösa problem inom en helt annan disciplin, och vi är glada över att se hur denna synergi skapar nya lösningar, sade Wood, som är en grundande kärnfakultetsmedlem av Wyss Institute, Charles River professor i teknik och tillämpad vetenskap vid SEAS, och även en National Geographic Explorer.
"Samarbete mellan olika discipliner är en avgörande egenskap hos Wyss Institute, och detta arbete exemplifierar hur nya innovationer kan dyka upp när forskare från vitt skilda områden börjar kommunicera med varandra, sade don Ingber, M.D., Ph.D., grundare av Wyss Institute som också är Judah Folkman professor i vaskulär biologi vid Harvard Medical School och Vascular Biology Program vid Boston Children's Hospital, samt professor i bioteknik vid SEAS.