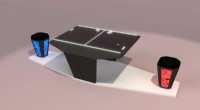
Modboat:Den billiga robotbåten som skapats av forskarna. Upphovsman:Knizhnik &Yim.
Forskare vid University of Pennsylvania's GRASP Laboratory har nyligen designat Modboat, en robotbåt som kan användas för att övervaka hav eller utföra marina operationer. Denna billiga vattenrobot, presenterad i ett papper som för publicerats på arXiv, kan simma i vattnet med en enda motor.
"Den ursprungliga idén för det här projektet kom från ett papper från 2015 skrivet av ett team vid Technion, i Israel, "Gedaliah Knizhnik, en av forskarna som genomförde studien, berättade TechXplore. "Mitt labb, som utforskar billiga robotar, hoppade på idén. Vi hade tidigare erfarenhet av vattenrobotar, så det här var en stor chans att utöka det. "
Det långsiktiga målet för forskningen som Knizhnik och hans kollegor vid University of Pennsylvania genomförde är att skapa svärmar av billiga robotbåtar som kan slutföra uppgifter som ett team, snarare än individuellt. Deras senaste studie är ett första steg i denna riktning, introducerar designen för en vattenrobot som är både effektiv och prisvärd.
Modbåt, roboten skapad av forskarna, är ganska enkelt, men den kan röra sig effektivt i vattnet. Roboten har en huvudkropp och två flippers. Den rör sig med en enda motor som svänger kroppen fram och tillbaka, låta den paddla och gå framåt i vatten.
Roboten kan styras i en viss riktning genom att justera hastigheten med vilken motorn svänger sin kropp åt vänster eller höger och hur hårt var och en av hans flippers paddlar. I motsats till roboten som utvecklats på Technion, som forskarna drog inspiration från, Modboats unika design gör det också möjligt att fungera bra i team.

Modbåt i vatten. Upphovsman:Knizhnik &Yim.
"Vår robot är inte en lika bra simmare som andra robotar, men denna design är unik eftersom den bara använder en motor, när standardkonventionen kräver att du behöver minst två, "Förklarade Knizhnik." Detta gör roboten billig att tillverka, så vi kan bygga många av dem och kompensera för dess svagare simprestanda. "
Forskarna utvärderade sin robot i en serie experiment och fann att även om den presterar avsevärt bra, det kämpar för att simma i en rak linje. Anledningen till detta är att den har en hög känslighet för hur dess centrummassa är placerad.
Denna känslighet härrör från rullvinkeln som inte är noll som förskjutningsmassan inducerar på roboten, vilket i sin tur ökar asymmetri i dragkraften hos sina individuella flippers. Mot slutet av deras papper, forskarna föreslår en alternativ designstrategi som kan minska denna känslighet till användbara nivåer.
"Att göra robotar överkomliga är hur vi får dem till mainstream, men prisvärda robotar är ofta mindre kapabla än sina dyra motsvarigheter, "Knizhnik sa." I denna studie har vi visat hur vi kan ta en unik designprincip och justera den för att göra den praktisk - i det här fallet genom att underlätta robotens förmåga att arbeta i team. De gör inte det ännu, men vi har gjort förberedelserna. "
Medan den billiga vattenroboten som introducerades av detta forskargrupp är mycket lovande, dess design behöver fortfarande förbättras innan den kan implementeras i stor skala. I framtiden, dock, det kan bana väg för skapandet av prisvärda automatiska robotbåtar som kan användas i flottor, att utföra uppdrag till sjöss snabbare och mer effektivt.
"Nu när vi har visat att denna design kan fungera och simma ganska bra, vi måste faktiskt få det att simma där vi vill, "Tillade Knizhnik." Vi arbetar med att få det att följa angivna vägar, så att vi kan använda den för sensorplacering, mått, etc."
© 2020 Science X Network