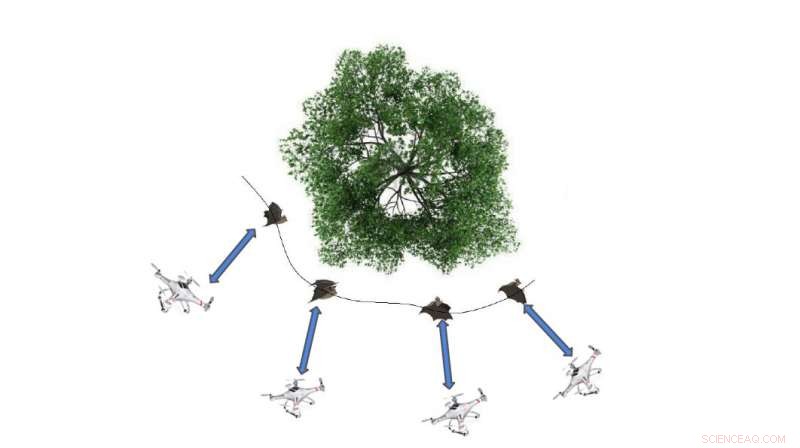
En fyrrotors UAV som navigerar över ett träd, härma fladdermusbeteende. Kredit:Tanveer et al.
På senare år har forskare över hela världen har försökt utveckla beräkningstekniker som återger beteenden hos människor eller djur i robotar och maskiner. Detta inkluderar, till exempel, den mänskliga hjärnans struktur och funktion, binas svärmkommunikationsförmåga, rörelsestilar för specifika arter av fiskar eller amfibier, och mycket mer.
Att bygga vidare på resultaten av tidigare studier, forskare vid Virginia Tech och University of Maryland har nyligen introducerat ett simuleringsramverk som kan användas för att återskapa fladdermusbeteende i fyrhjuliga UAV:er. Den här modellen, presenteras i en tidning förpublicerad på arXiv, föddes ur ett samarbete mellan Rolf Müller, en expert på biosonaravkänning, statistikerna Xiaowei Wu och Hongxiao Zhu, och datavetenskapsmannen Pratap Tokekar, finansierat av National Science Foundation (NSF).
"Vår allmänna idé var att bygga UAV:er som kan återskapa en fladdermuss beteende medan de navigerar i komplexa, naturliga miljöer, " berättade Zhu för TechXplore. "I just denna studie, vårt huvudmål var att bygga ett beräkningsramverk för att simulera fladdermössens avkänningsmiljöer och producera simulerade biosonarsignaler för tränings- och testsyften."
Simuleringsramen som utvecklats av Zhu och hennes kollegor består av en modell för att simulera slumpmässiga skogars geometri med träd och en modell som genererar biosonära signaler. Biosonarsignaler är korta ljud som produceras av fladdermöss och andra djur, inklusive valar och delfiner. Dessa ljud genererar ekon som innehåller värdefull information om den omgivande miljön, hjälpa djur i deras navigering, såväl som i deras jakt- och födosöksansträngningar.
Den nya ramens första komponent är en modell som ger detaljerad information om slumpmässiga miljöer. Den andra komponenten efterliknar de biologiska mekanismerna som möjliggör biosonarstyrd navigering hos fladdermöss, producera simulerade ekon som innehåller information om robotens omgivning.
Simuleringsmetoden som Zhu och hennes kollegor har tagit fram har flera unika funktioner och fördelar. En av de mest anmärkningsvärda är att den tillåter slumpmässiga simuleringar att köras upprepade gånger, sålunda kan det producera rika sensoriska data som skulle vara svårare att samla in med mer traditionella experimentella metoder.
"De största framgångarna för robotik hittills har varit begränsade, strukturerade miljöer som lager och industriella miljöer, "Tokekar, medutredare av studien, berättade för TechXplore. "Det finns ett stort intresse för att använda UAV i ostrukturerade miljöer som skogar och tätt bevuxna områden. Bara för att nämna två exempel:DARPA avslutade nyligen sin Fast, Lättvikt, Autonomi program, var, som samma antyder, tonvikten låg på smidiga UAV:er som verkar i skogsmiljöer, medan Army Research Lab tillkännagav ett nytt program som heter SARA med ett mycket liknande mål i åtanke."
Enligt Tokekar, naturen erbjuder otaliga exempel på beteenden som, om artificiellt replikeras, kan vara extremt användbart i robotikapplikationer. De biosonarstödda navigeringsförmågan som observerats hos fladdermöss, som deras studie fokuserar på, kan specifikt hjälpa till att förbättra navigering och objektdetektering i flygande robotar.
I framtiden, simuleringsplattformen utvecklad av Zhu, Tokekar och deras kollegor skulle kunna användas för att replikera detta specifika fladdermusbeteende i autonoma UAV:er med fyrrotor. Dessutom, det kan hjälpa forskare att utvärdera och jämföra olika fladdermusinspirerade navigationsalgoritmer inom simulerade miljöer.
"Den mest meningsfulla aspekten av vårt arbete är att det ger en bekväm plattform för utbildning och testning av bioinspirerade robotalgoritmer för UAV, " sa Zhu. "I våra nästa studier, Vi planerar att träna och testa robotalgoritmer för olika navigeringsuppgifter med hjälp av Biosonar -data som genereras i detta ramverk. "
© 2020 Science X Network