Kredit:arXiv:2002.08550 [cs.RO]
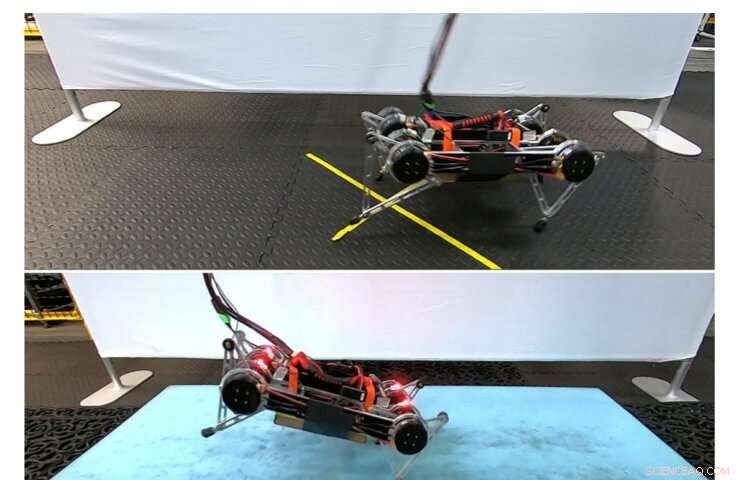
Robotteknikområdet tog ett steg framåt – följt av ett annat, sedan flera till — när en robot som heter Rainbow Dash nyligen lärde sig att gå. Den fyrbenta maskinen krävde bara några timmar för att lära sig gå bakåt och framåt, och sväng höger och vänster medan du gör det.
Forskare från Google, UC Berkeley och Georgia Institute of Technology publicerade en artikel om ArXiv preprint-servern som beskrev en statistisk AI-teknik känd som deep reinforcement learning som de använde för att producera denna prestation, vilket är betydelsefullt av flera skäl.
De flesta implementeringar av förstärkningsinlärning sker i datorsimulerade miljöer. Rainbow Dash, dock, använde denna teknik för att lära sig att gå i en verklig fysisk miljö.
Dessutom, det kunde göra det utan en dedikerad undervisningsmekanism, som mänskliga instruktörer eller märkt träningsdata. Till sist, Rainbow Dash lyckades gå på flera ytor, inklusive en mjuk skummadrass och en dörrmatta med ganska anmärkningsvärda urtag.
De djupa förstärkningstekniker som roboten använde omfattar en typ av maskininlärning där en agent interagerar med en miljö för att lära sig genom att trial and error. De flesta användningsfall för förstärkningsinlärning involverar datoriserade spel där digitala agenter lär sig hur man spelar för att vinna.
Denna form av maskininlärning skiljer sig markant från traditionell övervakad eller oövervakad inlärning, där maskininlärningsmodeller kräver märkt träningsdata för att lära sig. Djup förstärkningsinlärning kombinerar förstärkningsinlärningsmetoder med djupinlärning, där omfattningen av traditionell maskininlärning utökas kraftigt med enorm beräkningskraft.
Även om forskargruppen krediterade Rainbow Dash med att lära sig gå själv, mänskligt ingripande spelade fortfarande en betydande roll för att uppnå detta mål. Forskare var tvungna att skapa gränser inom vilka roboten lärde sig att gå för att hindra den från att lämna området.
De var också tvungna att ta fram specifika algoritmer för att förhindra att roboten ramlar ner, varav några fokuserade på att begränsa robotens rörelse. För att förhindra olyckor som fallskador, robotikförstärkningsinlärning sker vanligtvis i en digital miljö innan algoritmer överförs till en fysisk robot för att bevara dess säkerhet.
Rainbow Dashs triumf äger rum ungefär ett år efter att forskare först kom på hur man får robotar att lära sig i fysiska, i motsats till virtuella, miljö.
Chelsea Finn, en biträdande professor i Stanford med anknytning till Google som inte deltog i forskningen, säger, "Att ta bort personen från [inlärning]-processen är verkligen svårt. Genom att låta robotar lära sig mer självständigt, robotar är närmare att kunna lära sig i den verkliga världen att vi lever."
© 2020 Science X Network