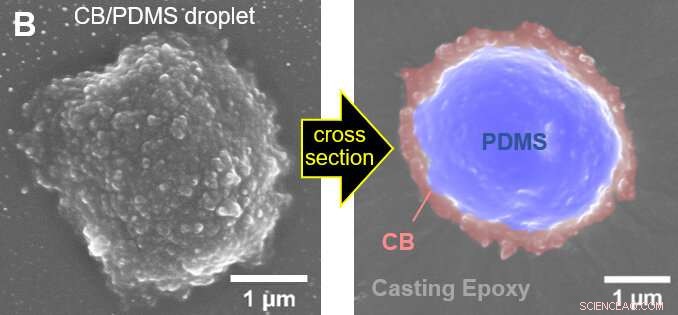
En droppe av emulsionen härdade i etanolmedium före (vänster) och efter att etanolen har avdunstat (höger). Tvärsnittsbilden är falskfärgad för att markera polyme-kärnan (blå) och kolsvart nanopartikelskal (röd). Kredit:Kim et al., Sci. Robot. 5, eaay3604 (2020)
Ett växande antal företag och forskargrupper världen över utvecklar nu kompatibla sensorer baserade på kompositmaterial, som kan ha ett brett spektrum av möjliga tillämpningar. Kompositmaterial, de som är gjorda av två eller flera ämnen, har ofta unika och fördelaktiga egenskaper som skiljer sig från de enskilda komponenternas.
Tidigare studier har funnit att kompositmaterial som innehåller polymermatriser och ledande fyllmedel är särskilt lovande för utvecklingen av kompatibla sensorer, eftersom de kan tryckas i stor skala. En viktig fördel med sensorer gjorda av denna klass av material är att de kan integreras i geometriskt komplexa eller flexibla system, såsom bärbara enheter och mjuka robotar.
Forskare vid Yale University har nyligen introducerat ett tillvägagångssätt som kan möjliggöra hållbar tillverkning av kompatibla sensorer för mjuka robotapplikationer. Detta tillvägagångssätt, presenteras i en Vetenskapsrobotik papper, involverar användningen av en etanolbaserad Pickering-emulsion som spontant koagulerar, skapa en ledande komposit som enkelt kan skrivas ut på mjuka robotsystem.
"Tryckning av kompositmaterial innebär i allmänhet användning av lösningsmedel, såsom toluen eller cyklohexan, för att lösa upp polymerhartset och tunna ut materialet till en tryckbar viskositet, " skrev forskarna i sin uppsats. "Men, sådana lösningsmedel orsakar svullnad och sönderdelning av de flesta polymersubstrat, begränsar användbarheten av kompositmaterialen. Dessutom, många konventionella lösningsmedel är giftiga eller på annat sätt utgör en hälsofara."
Medveten om de utmaningar man stöter på när man försöker skriva ut kompositmaterial med lösningsmedel, forskarna vid Yale tog fram ett nytt tillvägagångssätt som skulle kunna möjliggöra tillverkning av sensorer på ett mer effektivt och hållbart sätt. Strategin de utvecklade är baserad på användningen av en etanolbaserad Pickering-emulsion som koagulerar spontant, skapa en ledande komposit som kan skrivas ut i olika typer av sensorer.
"Pickering-emulsionen består av emulgerade polymerprekursorer stabiliserade av ledande nanopartiklar i en etanolbärare, " skrev forskarna i sin uppsats. "Vid avdunstning av etanolen, föregångarna släpps, som sedan smälter samman bland nanopartikelnätverk och polymeriserar spontant i kontakt med atmosfärens fukt."
När de väl definierade sin nya strategi för sensortillverkning, forskarna tryckte den självkoagulerande Pickering-emulsionen i ett antal polymersystem, inklusive traditionella textilmaterial och mjuka ställdon. Det ledande ämnet de använde gav dessa system avkänningsmöjligheter, vilket resulterar i olika typer av kompatibla sensorer.
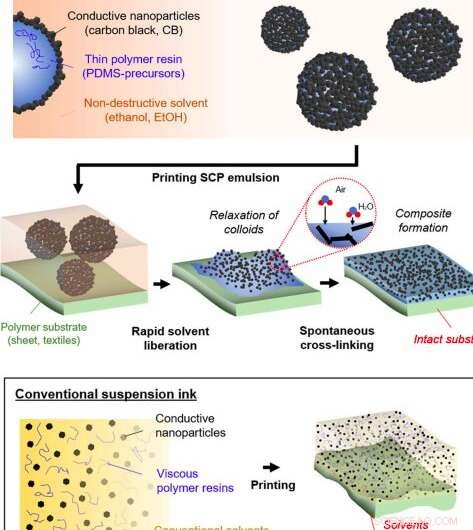
Illustration som visar hur SCP -emulsionen och utskriftsprocessen fungerar. Kredit:Kim et al.
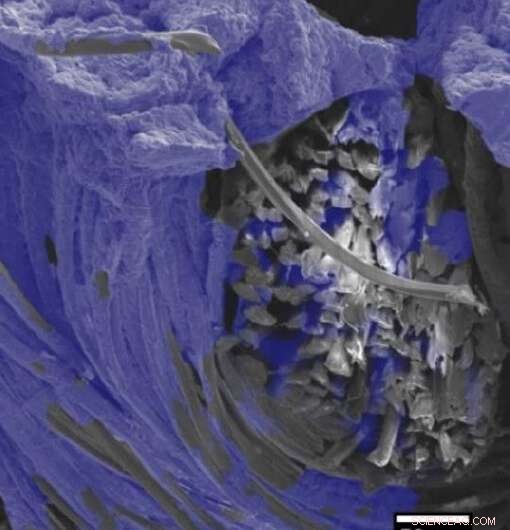
En närbild på de emulsionsinfunderade textilierna (grå). Emulsionen indikeras i blått. Kredit:Kim et al., Sci. Robot. 5, eaay3604 (2020)
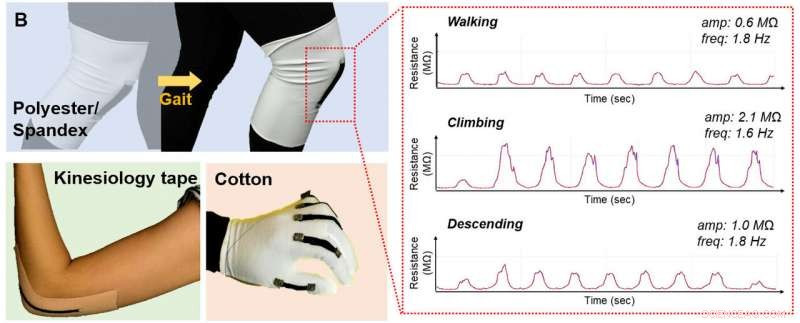
Att bara "måla" emulsionen på plagg och kinesiologitejp kan resultera i färdiga belastningsavkännande wearables. Kredit:Kim et al., Sci. Robot. 5, eaay3604 (2020)
Än så länge, forskarna har använt sin tillverkningsmetod för att skapa kompositinfunderad kinesiologitejp, knäskydd och bomullshandskar. De tillämpade också samma strategi för att tillverka mjuka robotskinn, dubbade OmniSkins, genom att trycka den ledande emulsionen på muslintyg och fästa ställdon på den.
I preliminära tester, Pickering emulsionsbaserade avkänningssystem som utvecklats av forskarna uppnådde en anmärkningsvärd töjningskänslighet och försumbar hysteres, som är mycket önskvärda egenskaper för de flesta bärbara teknologier och mjuka robotapplikationer. I framtiden, den nya tillverkningsstrategin som introducerades i detta senaste dokument skulle kunna möjliggöra en mer hållbar utveckling av innovativa och högpresterande avkänningstekniker, inklusive mjuka robotskinn och klädesplagg med avkänningsfunktioner.
© 2020 Science X Network