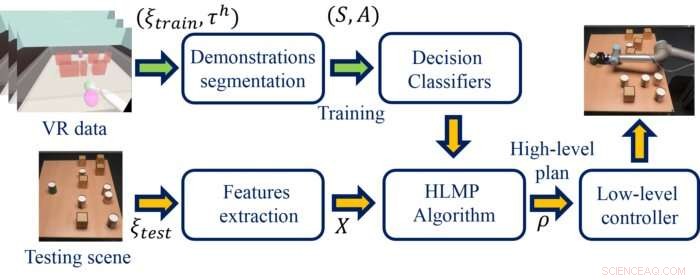
Figur som beskriver hur den människoliknande planeraren fungerar. Kredit:Hasan et al.
Även om forskning inom robotik har lett till betydande framsteg under de senaste åren, det finns fortfarande stora skillnader i hur människor och robotar hanterar objekt. Faktiskt, även de mest sofistikerade robotar som hittills utvecklats kämpar för att matcha objektmanipulationskunskaperna hos den genomsnittliga småbarnet. En särskild aspekt av objektmanipulation som de flesta robotar ännu inte har bemästrat är att nå och ta tag i specifika objekt i en rörig miljö.
För att övervinna denna begränsning, som en del av ett EPSRC-finansierat projekt, forskare vid University of Leeds har nyligen utvecklat en människoliknande robotplanerare som kombinerar virtual reality (VR) och machine learning (ML) tekniker. Denna nya planerare, presenterat i ett papper som för publicerats om arXiv och kommer att presenteras på den internationella konferensen om robotik och automatisering (ICRA), kan förbättra prestanda för en mängd olika robotar i objektmanipuleringsuppgifter.
"Vårt forskningsmål är att utveckla bättre robotsystem; system som kan hjälpa människor i en rad olika uppgifter, allt från att utforska farliga miljöer till att hjälpa ett barn att lära sig skriva, "Prof. Anthony G. Cohn, huvudutredare för studien, berättade TechXplore. "Så vi bildade en tvärvetenskaplig grupp av psykologer och datavetenskapare för att undersöka om vi kunde fånga människors beteende och omvända konstruera de regler som människor använder när de når föremål."
I motsats till andra forskare som utbildade maskininlärningsklassificerare i bilder av röriga miljöer, Cohn och hans kollegor ville generera utbildningsdata med hjälp av ny uppslukande teknik. I deras studie, de använde alltså VR -utrustning för att samla in data om människor som utför manipulationsuppgifter.
Senare, de använde ML-klassificerare för att analysera VR-data de samlade in och extrahera allmänna regler som kan ligga bakom mänskligt beslutsfattande. Planeraren använder dessa regler för att planera effektiva strategier för robotar som utför objektmanipuleringsuppgifter.
"Vi ville att de resulterande planerna som utfördes av roboten också skulle vara" läsbara för människor, "i den meningen att de skulle vara de som en människa skulle förvänta sig att en annan människa skulle avrätta, vilket inte är fallet för många nuvarande robotplaner, "Förklarade Cohn.
Besluten från människor som fullföljer manipulationsuppgifter tycks mest styras av kvalitativa representationer (dvs. inte det exakta avståndet och riktningen för alla objekt i omgivningen, utan snarare relativa avstånd och riktningar). I deras studie, forskarna försökte bättre förstå dessa beslutsprocesser för att delvis återge dem i ML-klassificerare.
"Vi undersökte hur människor når i scenarier där föremålen de tar tag i har särskilda rumsliga relationer och använde metoder som utvecklats av AI -forskare vid University of Leeds för att beskriva kvalitativt var föremålen befann sig, "Dr Mohamed Hasan, en stipendiat som arbetar med projektet, förklarade. "Detta innebar att planeraren kunde klassificera de kvalitativa rumsliga förhållandena mellan objekt och sedan välja de handlingar som människor skulle använda i det scenariot."
Den metod som Cohn och hans kollegor föreslår tillåter robotar att identifiera effektiva åtgärder för att nå ett objekt i ett rörigt utrymme mycket snabbare än de skulle om de var tvungna att överväga alla möjliga åtgärder. Det gör detta genom att ta fram en plan på hög nivå, som representeras som en sekvens av viktiga waypoints och rörelser. Denna plan överförs till en standardplanerare för låg nivå, som använder den för att planera detaljerade banor för robotens arm.
"Vår planerare fungerar på ett sätt som liknar processen att planera en resa genom att välja vilka städer att gå igenom och först senare bestämma exakt vilka vägar och körfält som ska tas, "Vi sa att detta tillvägagångssätt gör vår människoliknande planerare mycket effektivare än befintliga planerare."
Forskarna utvärderade sin planerare i en serie experiment, testa det i VR-scenarier där människor utförde manipulationsuppgifter i fysikbaserade robotsimuleringar och använde en riktig robotgrepp. Alla tre utvärderingarna gav mycket lovande resultat, med den människoliknande planeraren som överträffar en toppmodern, standardbanaoptimeringsalgoritm.
Planeraren som Cohn och hans kollegor utarbetade kunde generera effektiva strategier som tillät robotar att nå föremål i röriga miljöer snabbare och mer effektivt än vad de skulle göra när de använde standardbanaoptimeringstekniker. Förutom att introducera en lovande människoliknande planerare för robotmanipuleringsuppgifter, studien visar att VR-teknik kan användas för att studera mänskligt beteende och få en bättre förståelse för beslutsprocesser.
"Vår VR -plattform, som utvecklades internt vid University of Leeds, gjorde det möjligt för oss att registrera hundratals räckvidd på en kort tid, men vi kan också ändra miljön mellan varje försök och enkelt presentera exakt samma miljö för olika mänskliga deltagare, "sade professor Mark Mon-Williams, medutredare och en kognitiv psykolog, förklarade. "Våra resultat stöder våra senaste förslag om att VR kommer att bli ett av de mest allestädes närvarande verktygen inom psykologisk forskning. Ändå fann vi också att regler som ligger till grund för val av mänskligt handlande kan fångas med ML -metoder."
I framtiden, planeraren som utvecklats av Cohn och hans kollegor kan bidra till att förbättra manipulationskunskaperna hos både befintliga och nya robotar, tillåter maskiner att välja åtgärder mer effektivt och potentiellt till och med förklara "resonemanget" bakom deras beslut. Denna färska studie kan också uppmuntra andra forskare att använda VR-data när de undersöker mänskliga beslutsprocesser, som då kunde reproduceras bättre i maskiner.
Det slutliga målet med forskningen är att bygga intelligenta robotar som kommer att förstå och förutse mänskliga avsikter i samarbete mellan människor och robotar. Helst, sådana robotar skulle också kunna svara på människoliknande sätt, kommunicera med mänskliga användare på samma sätt som en annan människa skulle.
"Det nuvarande arbetet är ett bevis på koncept, så vi planerar nu att ta den metod vi utvecklat och utnyttja dess enorma potential, "Sade Mon-Williams." Det har blivit klart att denna kombination av datavetenskap och psykologi är ett mycket användbart tillvägagångssätt som har potential att belysa valet av mänskliga handlingar, vilket är viktigt av flera skäl, inklusive förståelse för hur man behandlar medicinska tillstånd som stroke, samt hjälpa oss att designa effektivare robotar. Vi arbetar för närvarande med vår nästa serie experiment och projekt. "
© 2020 Science X Network