En mänsklig tumme bredvid OmniTact och en amerikansk slant; visar sensorns storlek. Upphovsman:Padmanabha et al.
Under de senaste åren har forskare världen över har försökt utveckla sensorer som kan replikera människors beröringskänsla i robotar och förbättra deras manipulationskunskaper. Medan några av dessa sensorer uppnådde anmärkningsvärda resultat, de flesta befintliga lösningar har små känsliga fält eller kan bara samla bilder med låg upplösning.
Ett team av forskare vid UC Berkeley utvecklade nyligen en ny mångriktad taktil sensor, kallas OmniTact, som övervinner några av begränsningarna för tidigare utvecklade sensorer. OmniTact, presenterat i ett papper som för publicerats på arXiv och kommer att presenteras på ICRA 2020, fungerar som en konstgjord fingertopp som gör att robotar kan känna av egenskaperna hos objekt som de håller eller manipulerar.
"Vårt labb insåg behovet av en sensor för allmänna robotmanipuleringsuppgifter med utökade funktioner än nuvarande taktila sensorer, "Frederik Ebert, en av forskarna som genomförde studien, berättade TechXplore. "" Befintliga taktila sensorer är antingen platta, har små känsliga fält eller bara ger lågupplösta signaler. Till exempel, GelSight -sensorn ger hög upplösning (dvs. 400x400 pixlar) bilder men är stor och platt, ger känslighet på endast ena sidan, medan OptoForce -sensorn är krökt, men ger bara kraftavläsningar vid en enda punkt. "
OmniTact, sensorn utvecklad av Ebert och hans kollegor, är en anpassning av GelSight, en taktil sensor skapad av forskare vid MIT och UC Berkeley. GelSight kan generera detaljerade 3D-kartor över ett föremåls yta och upptäcka några av dess egenskaper.
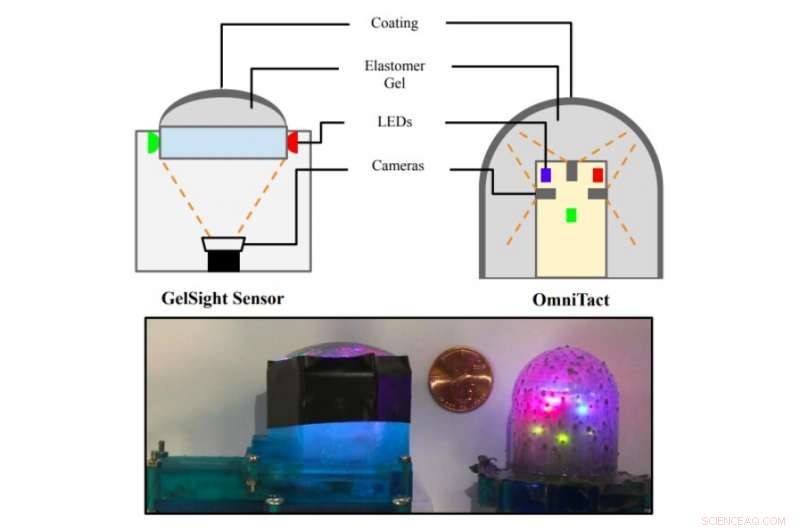
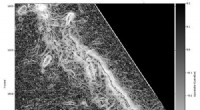
En illustration och bild som förklarar de grundläggande skillnaderna mellan GelSight -sensorn och OmniTact. Upphovsman:Padmanabha et al.
I motsats till GelSight, OmniTact är flera riktningar, vilket innebär att alla dess sidor har avkänningsmöjligheter. Dessutom, det kan ge högupplösta avläsningar, är mycket kompakt och har en böjd form. När den är integrerad i en gripare eller robothand, sensorn fungerar som ett känsligt artificiellt finger, "låter roboten manipulera och känna ett brett spektrum av objekt som varierar i form och storlek.
OmniTact byggdes genom att bädda in flera mikrokameror i en konstgjord hud gjord av silikongel. Kamerorna upptäcker flerriktade deformationer av den gelbaserade huden, producerar en rik signal som sedan kan analyseras med datorsyn och bildbehandlingstekniker för att utläsa information om de objekt som en robot manipulerar.
"Vårt team använder inlärningsbaserade metoder för att använda högupplöst feedback och undvika manuella kalibreringsprocedurer, "Akhil Padmanabha, en annan forskare som är involverad i studien, berättade TechXplore. "OmniTact ger beröringsavkänning på alla sidor av sensorn, så att robotar får tillgång till taktil feedback samtidigt som de tar kontakt med objekt i alla riktningar. "
Ebert, Padmanabha och deras kollegor utvärderade sin sensors prestanda på en ganska utmanande uppgift, där en robot måste sätta in en elektrisk kontakt i ett uttag. De testade också dess förmåga att utläsa kontaktens vinkel på ett finger när det tryckte mot ett givet föremål. I dessa inledande utvärderingar, OmniTact uppnådde anmärkningsvärda resultat, överträffar både en taktil sensor som bara är känslig på ena sidan och en annan multi-directional sensor i tillståndsuppskattningsuppgiften.
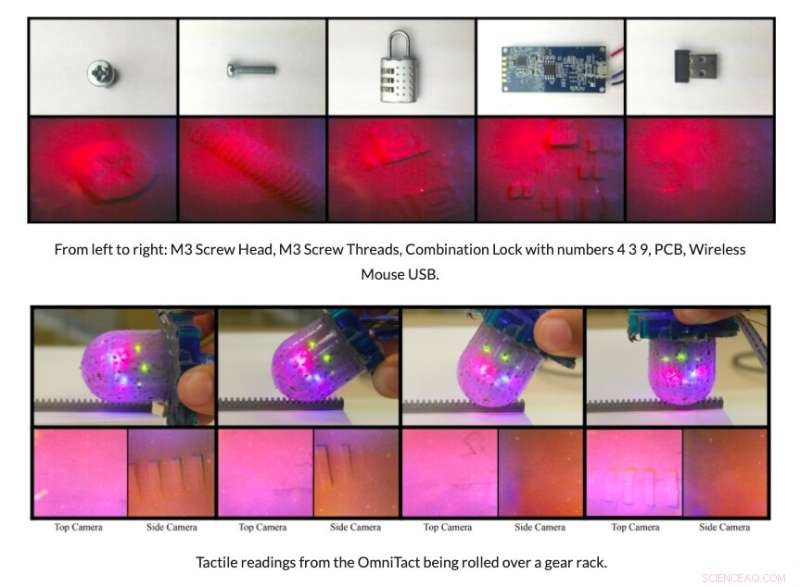
Upphovsman:Padmanabha et al.
"Genom våra experiment med OmniTact, vi upptäckte att flera riktningar, högupplöst taktil avkänning möjliggör vissa finkorniga manipulationsuppgifter, till exempel anslutningsinsatsuppgiften vi presenterade, "Stephen Tian, en annan forskare som är involverad i studien, berättade TechXplore. "Vi misstänker att multiriktad taktil avkänning i framtiden kan vara ett väsentligt element i robotmanipulation för allmänna ändamål utöver applikationer som robotisk teleoperation i kirurgi, liksom i havs- och rymduppdrag. "
Forskarna byggde sin sensor med hjälp av mikrokameror som vanligtvis används i endoskop, gjuta silikongelen direkt på kamerorna. Som ett resultat, OmniTact är mycket mer kompakt än tidigare utvecklade GelSight -sensorer och kan därmed ha ett bredare utbud av möjliga applikationer. I framtiden, det kan bana väg för skapandet av nya robotar med mer sofistikerade avkänningsmöjligheter.
"Vi planerar att göra OmniTact billigare och mer kompakt, så att den kan användas i ett bredare spektrum av uppgifter. Vårt team planerar dessutom att utföra mer robotmanipuleringsforskning som kommer att informera kommande generationer av taktila sensorer, "Sa Padmanabha.
© 2020 Science X Network