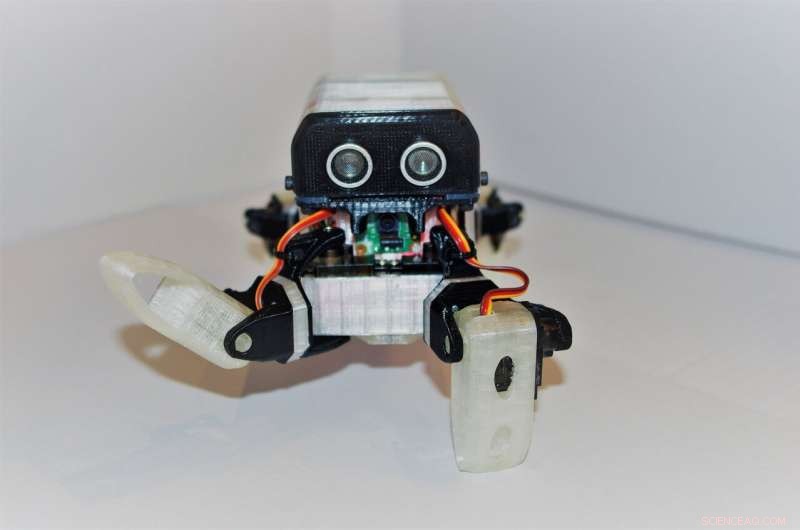
LoCoQuad, roboten som utvecklats av forskarna. Kredit:Bernal &Civera
Djurens beteenden och de biologiska mekanismer som ligger till grund för dem är bland de största inspirationskällorna för robotstudier. Under det senaste decenniet eller så, otaliga forskarlag vid universitet och företag världen över har försökt utveckla robotar som återskapar beteendet eller strukturen hos specifika djurarter.
Ett av de senaste försöken gjordes av två forskare vid University of Zaragoza, Manuel Bernal Lecina och Javier Civera, som nyligen utvecklade en fyrbensrobot som heter LoCoQuad inspirerad av spindeldjur. Denna robot, presenterad i ett papper som för publicerats på arXiv, kan ha ett antal tillämpningar inom robotforskning och -utbildning.
"Denna forskningsresa började med ett sommarprojekt som blev min kandidatexamen, " Bernal-Lecina berättade för TechXplore. "Den ursprungliga idén var att bygga en superlåg kostnadsrobotplattform som klarar grundläggande ad-hoc-rörelser, som rotation, gående, och inta specifika poser. Jag började bygga grundläggande prototyper och testa fördelarna med varje iteration, söka efter rätt typologi och den bästa kompromissen för pris-kvalitet för ställdon, styrenheter, och batterier."
Efter att han gjort omfattande forskning om billiga robotar och producerat ett antal komponenter med 3D-utskrift, Bernal-Lecina började samarbeta med Javier Civera, hans mentor på universitetet, om skapandet av en ny robot. Deras mål var att utveckla en billig robotplattform som kunde användas som ett riktmärke för att träna och utvärdera algoritmer för förstärkningsinlärning (RL).
"Vår studie tog upp det nuvarande behovet av robotplattformar som kan lära sig genom att göra, något komplicerat för en billig robot, men också något vi ständigt ser i sociala nätverk, mobilteknik och andra digitala miljöer, " sa Bernal-Lecina.
LoCoQuad, den arachnoid-inspirerade, fyrbent robotplattform skapad av Bernal-Lecina och Civera, har anmärkningsvärt låga hårdvarukostnader (mellan $150 och $165 USD), och kunde således lätt tillverkas i stor skala. Även om det kanske inte är den mest effektiva fyrhjuliga roboten som utvecklats hittills, dess låga produktionskostnad, det faktum att det är öppen källkod, mycket konfigurerbar och användarvänlig, göra det till en mycket lovande plattform för både forskning och utbildning.
"Jag gillar alltid att prata om LoCoQuad som en robotplattform som kan nästan allt, " sa Bernal-Lecina. "Men att vara realistisk och lite mer rationell, LoCoQuad är en låda med fyra ben, helt öppen källkod och allmänt ändamål, med flexibiliteten att implementera ett brett utbud av algoritmer, allt från beteenden som är relevanta för grundläggande utbildningsändamål till utvecklingen av toppmoderna på de högsta utbildningsnivåerna."
Som en del av deras studie, Bernal-Lecina och Civera visade effektiviteten av LoCoQuad i en serie experiment. De fann att roboten kunde utföra en mängd olika grundläggande uppgifter, vilket tyder på att det är en bra plattform för att testa förstärkningsinlärning och andra maskininlärningsalgoritmer.
"Idén att ta ut prisvärda robotar på marknaden ligger i de egenskaper som dessa robotar kan ha, " sa Bernal-Lecina. "Vi behöver inte fler dumma robotar, vi har redan nog av dem, och vi vet hur man använder dem. Vi behöver smarta och autonoma robotar så vi behöver inte oroa oss för dem. Jag tror att robotar borde, faktiskt, ta hand om oss."
Maskininlärningstekniker, såsom modeller för förstärkning av lärande, spelar nu en avgörande roll i utvecklingen av smarta och effektiva robotar. LoCoQuad, den lågkostnadsrobotplattform som utvecklats av Bernal Lecina och Civera, kan användas för att testa några av dessa tekniker och identifiera sätt på vilka de kan förbättras.
"LoCoQuad är bara en bit till av pusslet, " Bernal Lecina förklarade. "Det tillåter oss att visa att även klumpiga, billiga och enkla robotar kan läras (eller lära sig själva) att utföra grundläggande och komplexa uppgifter. LoCoQuad kommer med ett nytt alternativ för att verifiera att nästa stora milstolpe inom robotikområdet är möjlig."
Bernal Lecina och Civera har redan börjat använda LoCoQuad i andra studier för att jämföra algoritmer och identifiera de mest effektiva. LoCoQuads design och den programvara som är nödvändig för att implementera den har publicerats online och kan laddas ner gratis på GitHub. Forskarna hoppas att andra team över hela världen kommer att ladda ner sin programvara och börja använda LoCoQuad för att testa sina egna algoritmer för maskininlärning.
"Vi kommer att fortsätta arbeta med uppdateringar för vår fantastiska lilla robot, ", sa Bernal Lecina. "Vårt första mål är att förbättra hjärnans förmåga att göra plattformen mer intressant för andra universitet och forskargrupper, så att de kan börja använda LoCoQuad som referensplattform för att testa sina algoritmer och även börja lära ut mobil robotik på lägre akademiska nivåer med en robot för varje elev."
© 2020 Science X Network