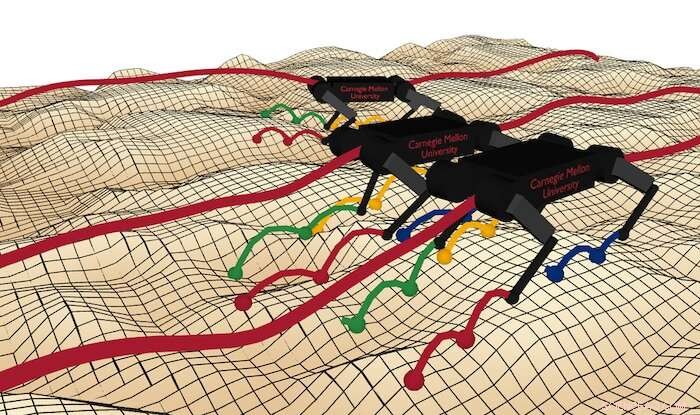
Quad-SDK är ett ramverk med öppen källkod i full stack för smidig fyrfotingsrörelse. Kredit:Robomechanics Lab, Carnegie Mellon University
Carnegie Mellon-forskare har utvecklat en mjukvara med öppen källkod som möjliggör smidigare rörelser i robotar med ben.
Robotar kan hjälpa människor med uppgifter som att hjälpa till vid katastrofåterställning eller att övervaka miljön. När det gäller fyrfota, robotar som går på fyra ben, kräver deras rörlighet många programvarukomponenter för att fungera sömlöst tillsammans. De flesta forskare måste lägga mycket av sin tid på att utveckla infrastruktur på lägre nivå istället för att fokusera på beteenden på hög nivå.
Aaron Johnsons team i Robomechanics Lab vid Carnegie Mellon Universitys College of Engineering har upplevt dessa frustrationer på egen hand. Forskarna har ofta varit tvungna att förlita sig på enkla modeller för sitt arbete eftersom befintliga mjukvarulösningar inte var öppen källkod, inte gav ett modulärt ramverk och saknade end-to-end-funktionalitet.
Som ett exempel på innovation född av nödvändighet, designade Johnson, en docent i maskinteknik, och hans team sin egen rörelsemjukvarastack, Quad-SDK, ett ramverk i full stack för smidig fyrfotingsrörelse.
Designen kan förenkla utvecklingsprocessen för robotister överallt eftersom den använder en öppen källkodslicens, vilket innebär att programvaran kan användas och modifieras som användaren vill. Quad-SDK kommer redo att användas, så forskare behöver inte oroa sig för att implementera verktygen och infrastrukturen; istället kan de börja arbeta med beteenden och tillämpningar.
Till skillnad från andra alternativ är Quad-SDK också kompatibel med Robot Operating System (ROS). ROS är ett mellanprogram, någonstans mellan hårdvara och mjukvara, som låter olika delar av ett system prata med varandra. Till exempel, om en robot känner av ett hinder i sin väg och behöver överföra information från sin perceptionsmodul till sin beslutsmodul, är ROS det som möjliggör den kommunikationen. Föreställ dig en app som inte använder iOS eller Android – det är mycket enklare när allt fungerar tillsammans.
Rörelse är ett skiktat problem, eftersom teammedlem och doktorand. studenten Ardalan Tajbakhsh beskriver det:"För att göra något meningsfullt på en robot måste du ha många komponenter som fungerar sömlöst tillsammans." Quad-SDK tillhandahåller ett ramverk för robotteknikforskare och -utvecklare att fokusera sina ansträngningar på kärnalgoritmerna istället för mjukvaruverktygen och infrastrukturen.
Andra mjukvarupaket är mycket bra på att lösa en komponent, som rörelseplanering, men det är viktigt att ha ramverk från slut till ände som tillhandahåller de nödvändiga algoritmerna, verktygen och infrastrukturen för att utföra robotforskning av hög kvalitet.
Quad-SDK är full stack, vilket innebär att den innehåller alla nivåer i hierarkin som påverkar fyrdubbla rörelser, till att börja med global planering. Ett lager sitter överst i stapeln; Tajbakhsh jämför det med Google Maps, eftersom det väljer vart roboten ungefär ska gå för att nå sin destination. Nästa lager, lokal planerare, är det som avgör ruttens detaljer, som var roboten ska placera sina fötter. Detta kulminerar i ett tredje lager, robotföraren, som skickar kommandon till fyrfotingens leder för att utföra den önskade rörelsen.
Under veckorna sedan Quad-SDK vann ett pris för bästa papper vid Workshop on Legged Robots vid 2022 IEEE International Conference on Robotics and Automation (ICRA), har människor begärt att få använda det, en indikator på hur användbara dess lösningar är och hur formatet med öppen källkod inbjuder till samarbete inom robotsamhället. + Utforska vidare