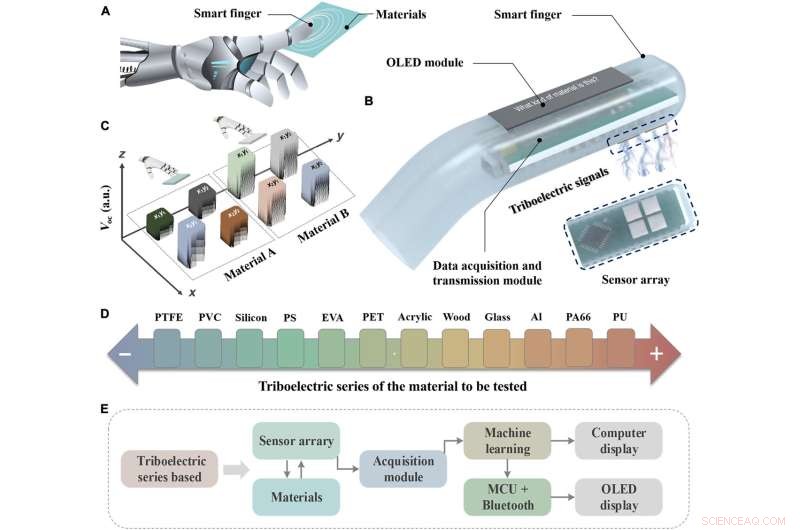
(A) Schematiskt diagram över materialidentifieringsprocessen för det triboelektriska känselförnimmelsens smarta finger. (B) Strukturen hos det triboelektriska taktila perceptionssmartfingret, bestående av en triboelektrisk sensoruppsättning, datainsamlings- och överföringsmodul och displaymodul. (C) Schematiskt diagram över utsignalerna från den triboelektriska sensoruppsättningen när smartfingret identifierar olika material. a.u., godtyckliga enheter. (D) Typiska material placerade i olika positioner i den triboelektriska serien:Elektronegativiteten ökar från höger till vänster; omvänt ökar elektropositiviteten från vänster till höger. (E) Flödesschema över interaktionen mellan modulerna i det smarta fingret vid identifiering av material. Kredit:Science Advances (2022). DOI:10.1126/sciadv.abq2521
Ett team av forskare vid den kinesiska vetenskapsakademin har utvecklat ett konstgjort finger som kunde identifiera vissa ytmaterial med 90 % noggrannhet. I deras artikel publicerad i tidskriften Science Advances , beskriver gruppen hur de använde triboelektriska sensorer för att ge sitt testfinger en förmåga att få en känsel.
Tidigare forskning har lett till utvecklingen av robotfingrar som har förmågan att känna igen vissa egenskaper hos vissa ytor, såsom tryck eller temperatur – teamet med denna nya ansträngning har tagit sådana ansträngningar vidare genom att lägga till förmågan att identifiera ett material som är berörs.
Fingret skapades genom att applicera små fyrkantiga sensorer på spetsen av ett fingerformat föremål. Var och en av kvadraterna var gjorda av olika typer av plastpolymer, var och en vald på grund av sina unika elektriska egenskaper. När sådana sensorer flyttas nära ett föremål, till exempel en plan yta, interagerar elektroner från sensorerna med materialen på unika sätt.
Sensorerna under polymeren var alla anslutna till sina egna processorer inuti fingret, som sedan kopplades samman för att möjliggöra jämförelse av resultat och för maskininlärningsbaserad dataanalys. Forskarna bifogade också en liten LCD-skärm för att visa resultat. Forskarna testade sedan sitt finger genom att få det vid olika plana ytor som de gjorda av glas, trä, plast och kisel. De fann att den kunde detektera rätt material i genomsnitt 96,8 % av tiden, med en minsta noggrannhet på 90 % för alla ytor. Forskarna testade också fingret för uthållighet genom att låta det röra vid en yta tusentals gånger och fann att det höll tillräckligt bra för industriella tillämpningar.
Forskarna föreslår att om deras finger skulle användas i en industriell miljö skulle det kunna kopplas direkt till en kontrollmekanism. De föreslår också att den kan användas för att testa produkter för att säkerställa att de uppfyller tillverkningsstandarder. Och de noterar också att ett sådant finger också kan användas på en mänsklig robot i full storlek, vilket ökar dess kapacitet. De påpekar att tekniken bakom deras finger sannolikt skulle kunna användas i protesanordningar för att hjälpa till att återställa en viss grad av beröring för personer som har förlorat en sådan förmåga. + Utforska vidare
© 2022 Science X Network