Teknologin som undersöks i SeaClear -projektet testas i hamnen i Hamburg, bland andra. Kredit:HPA
Åttiosex miljoner ton plast hamnar i haven varje år, med förödande konsekvenser för livet i havet, naturen och, i sista hand, för oss människor. De stora flytande fläckarna av plast som täcker vattenytan, några lika stora som hela länder, är bara toppen av isberget. Runt 90 procent av detta skräp hamnar på havsbotten. Fraunhofer Centre for Maritime Logistics and Services CML och ett internationellt nätverk av partners vill vara först med att göra ordning på denna röra med ett projekt som heter SeaClear. En intervju med projektledarna Johannes Oeffner och Cosmin Delea följer.
Du siktar på att samla skräp på havsbotten i projektet SeaClear. Varför?
Oeffner:Havsföroreningar är ett av de viktigaste globala problemen. Det påverkar miljön, ekonomin, säkerhet, hälsa och kultur. Plast bryts inte ner lätt, så de kommer sannolikt att stanna kvar i havet i hundratals år. Med tanke på att prognoserna förväntar sig att plastproduktionen kommer att fyrdubblas till 2050, vi kommer att ha ett enormt problem om vi inte vidtar åtgärder. Enligt World Economic Forum WEF, förhållandet mellan plast och fisk 2014 var ett till fem – år 2050 kan det finnas lika mycket plastavfall som det finns fisk.
Många tillvägagångssätt för att skumma plastskräp från havsytan har lagts fram. Vad är ditt koncept?
Oeffner:Vi koncentrerar oss på att städa upp havsbotten först, särskilt i kustområden där föroreningarna är särskilt stora. I SeaClear-konceptet, vi använder oss av olika robotfordon som är kopplade till varandra. Ett autonomt eller fjärrstyrt moderskepp (obemannat ytfordon, USV) stöds av två undervattensrobotar (fjärrstyrda fordon, ROV) och ett flygfordon eller drönare (obemannat flygfordon, UAV). Vi distribuerar drönaren och en robot för att kartlägga kullen på ytan och i vattenspelaren. Den andra ROV:en använder sig av denna information och använder en specialdesignad gripare och en suganordning för att samla upp det kartlagda skräpet på havsbotten och kasta det till en samlad soptunna.

Tack vare SeaClear-projektet, Dubrovniks kust ska i framtiden befrias från undervattensavfall. Kredit:DUNEA
Vilken teknik ligger bakom allt detta?
Delea:Vi använder multi-agent kontrollmetoder för heterogena robotar för att synkront styra alla autonoma fordon. Det betyder att den ena robotens positionsförändring erkänns av de andra robotarna. Varje robot har den inbyggda förmågan att anpassa sig till dessa förändringar utan mänsklig inblandning. Även om vi utfärdar ett kommando, det är specifikt riktat till en robot, medan de andra robotarna kommer att märka förändringen i pose och reagera vid behov. Vi använder algoritmer för djupinlärning för att upptäcka och särskilja avfall från marin fauna och flora. Specifikt, vi kombinerar olika sensoriska system som konventionella och multispektrala kameror eller akustiska sensorer för att få relevant data om vattnet och, efter flera träningspass, för att online upptäcka och klassificera marint avfall.
Hur tränar man de autonoma robotarna?
Delea:Detektering och klassificering kräver intensiv träning. De första stegen för båda är att använda information från allmänt tillgängliga källor, till exempel stora onlinedatabaser som ger bilder av marint liv. Sedan genomför vi vidareutbildning med dummymål. Innan de sista demonstrationerna äger rum, preliminära försök hålls för att bedöma deras prestation.
Kustområden är väldigt olika. Var äger dessa prövningar rum?
Oeffner:Vi testar för närvarande teknikerna i två olika scenarier på två platser på 20 till 30 meters djup. Vi vill demonstrera processen medan hamnverksamheten pågår med befintlig infrastruktur och fasta rutiner i Hamburgs hamn. Det är därför detta scenario fokuserar på industriområdet i hamnen. Kustscenariot i Dubrovnik, Kroatien, riktar sig till turistsektorn och syftar specifikt till att rena vattnet vid turistorter. De första försöken ägde rum på båda platserna under våren. Ytterligare tester planeras för Dubrovnik på sensommaren efter att försöken avbröts på grund av corona.
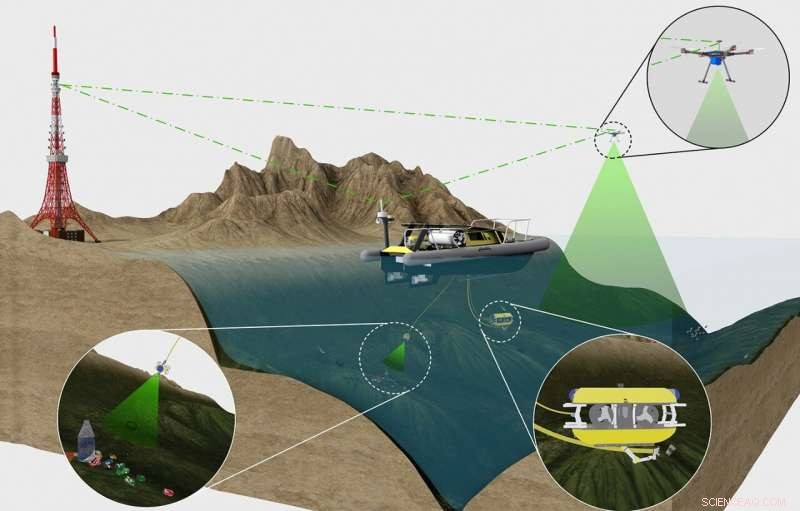
Olika robotfordon är sammankopplade med varandra i SeaClear-systemet. Ett autonomt eller fjärrstyrt moderfartyg (UPS) på ytan stöds av två undervattensrobotar (ROV) och en flygdrönare (UAV). Kredit:TUM
Vilka är de största utmaningarna i det här projektet?
Delea:Utmaningarna på de två testplatserna är olika:Vattnet i Hamburg är mycket svåra att analysera på grund av deras grumlighet och låga sikt. Dessutom, för närvarande finns det ingen tydlig statistik över typen och mängden undervattensavfall i hamnområdet. Det är här vi vill vidareutveckla robustheten och individuella egenskaper hos SeaClear-systemet och göra det marknadsfärdigt. För detta ändamål, vi har tagit med oss intressenter från hamnen i Hamburg för att titta på SeaClear som en framtida hamntjänst. Den stora svårigheten i Dubrovnik är att allmänhetens tillgång inte kan begränsas. Å andra sidan, detta innebär att ett antal ytterligare säkerhetsåtgärder kommer att bli nödvändiga, som måste tas när systemet testas på plats. Men sikten i dessa vatten är nära idealisk, så huvudsyftet är att validera det övergripande systemet och visa dess kompletta uppsättning funktioner.
Hur hanterar du dessa problem?
Delea:I Hamburg, vi försöker slå samman data från olika sensorer när vi kartlägger den marina skräpet för att bedöma vilken typ av undervattensskräp som finns i dessa vatten. Vi använder främst akustiska sensorer på grund av den begränsade sikten. I Dubrovnik, vi kommer att installera ytterligare säkerhetsmekanismer på den flygande drönaren, med viss hjälp från sensorerna på moderskeppet. Syftet här är att minimera säkerhetsproblem och förhindra kollisioner.
Och hur ska du se till att ömtåliga ekosystem som korallrev inte skadas?
Delea:Det här problemet finns inte i Hamburg, medan den kroatiska testplatsen också har få korallrev. Men när det slutliga SeaClear-systemet kommer att distribueras, det kommer att använda optiska sensorer och AI för att skilja korallreven, Undvik svåra/farliga procedurer för att bara samla upp skräpet.
Vilken del av projektet är Fraunhofer CML:s ansvar och vilka är de andra partners i denna satsning?
Oeffner:CML är projektets tekniska koordinator och ansvarar för att integrera det övergripande systemet samt designa och utveckla undervattenskorgen för att hålla det insamlade avfallet. Vad mer, vi utvecklar ett virtuellt övervakningscenter som skickar kommandon till robotarna och sprider deras data. I projektet ingår också att sätta upp kommunikationsnätverket och den serverinfrastruktur som behövs för att tillhandahålla SeaClear-tjänster till de olika klienterna via webbgränssnitt. Konsortiet består av de tekniska universiteten i München, Delft, Dubrovnik och Cluj-Napoca samt SubSea Tech Marseille, hamnmyndigheten i Hamburg och DUNEA Regional Development Agency Dubrovnik. Målet är att de två sistnämnda organisationerna också ska driva och använda det utvecklade systemet efter att projektet är avslutat.