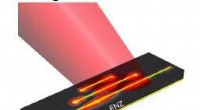
När olika laboratorier testar samma accelerometer, som den i din smartphone, de kommer ofta med väldigt olika värderingar. Det finns flera möjliga orsaker:Kanske är axlarna i gimbalsystemet som används vid testning inte helt i linje, eller de inre axlarna på själva enheten som testas (DUT) är felaktiga, eller kanske DUT är monterad på testbordet felaktigt. För att ta bort dessa problem, NIST -forskare gör mätningar för att bestämma DUT:s ”inneboende” egenskaper - de som är unika för själva enheten. Den här videodemonstrationen innehåller bilder av det högprecisionsgimbalbordet som används för att rotera DUT (i det här fallet, en smartphone) på alla tre axlarna samtidigt.
Accelerometrar - enheter som mäter förändring i hastighet - är inbyggda i bilar, flygplan, mobiltelefoner, pacemakers, och mängder av andra produkter. De varnar för potentiellt destruktiva vibrationer i industriell utrustning, byggnader, och broar; registrera seismiska stötar; och styr missiler till sina mål.
Alltmer, de är miniatyriserade med hjälp av mikroelektromekaniska system (MEMS) -teknologier med komponentdimensioner i storleksordningen mikrometer, och samtidigt registrera acceleration i alla tre axlarna i det tredimensionella rummet. Eftersom fel är additiva vid beräkning av hastighet från acceleration, även mindre fel i produktionen kan få mycket allvarliga konsekvenser.
Men när tre-axlig känslighet och tväraxelkänslighet hos en digital tre-axlig enhet testas på olika kalibreringslaboratorier, måtten kan variera kraftigt beroende på faktorer som kan vara svåra att fastställa, men uppstår ofta av fel med inriktning av testutrustningen, den inre justeringen av accelerometrarna i enheten, eller båda.
Nu har NIST -forskare tagit fram en metod för att minska eller eliminera dessa skillnader genom att karaktärisera en accelerometers inneboende egenskaper - de som är unika för den oberoende av hur den är monterad eller testad - vilket möjliggör exakta interlaboratoriska jämförelser.
"Bestämning av inneboende egenskaper är en del av NISTs större ansträngning för att hjälpa industrin att utveckla standardtestprotokoll för de nya MEMS-baserade enhetsteknologierna, som inte finns för närvarande, "säger Michael Gaitan från NIST:s fysiska mätlaboratorium, som arbetar i partnerskap med MEMS and Sensors Industry Group (MSIG) och Institute of Electrical and Electronics Engineers. "Testning rapporterades av MSIG att vara så mycket som hälften av tillverkningskostnaden för den här typen av enheter. Tillverkare kan inte sänka kostnaden för fysisk tillverkning särskilt mycket. Men de kan hitta besparingar i hur de paketerar, testa, och kalibrera enheterna. "
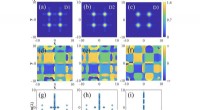
När MEMS-baserad, tre-axliga accelerometrar testas, de är vanligtvis monterade på ett kardansystem och roteras cirka tre axlar - x, y, och z - med mätningar i olika riktningar. Måtten är formaterade i ett tre-av-tre-rutnät, kallas en "korskänslighetsmatris, "används av tillverkare för att utvärdera enhetens prestanda. Det anger sambandet mellan accelerationssvaret längs gimbalaxlarna till svaret längs axlarna på enheten som testas (DUT).
Den processen, dock, antar att DUT:s tre axlar är perfekt ortogonala - i rät vinkel mot varandra - och att enheten har monterats i perfekt inriktning med axelaxlarna, som i sig är perfekt anpassade. Och när man testar accelerometerpaket efter att de har integrerats i produkter, som smarta telefoner, det förutsätter att paketet installerades i exakt linje med axlarna på telefonväskan. Men inget av dessa villkor är garanterat, och små avvikelser i någon av variablerna kan förklara varför mätningar av samma testenhet som gjorts på olika laboratorier ger olika värden.
"Så istället för att använda korskänslighetsmatrisen ensam, " Gaitan säger, "vi definierar enheten som med inneboende egenskaper där enhetens axlar inte antas vara helt ortogonala. Det kan finnas en viss variation i deras inriktning."
I NIST:s mätprotokoll, DUT är monterad på positions- och hastighetstabellen som mycket exakt roterar enheten i specifika graderingar genom 360 grader på var och en av gimbalens tre axlar samtidigt som enhetens respons mäts vid varje intervall. Protokollet avslöjar DUT:s inre axeluppriktning, storleken på svaret för varje axel i olika riktningar, och dess "signalförskjutning" - den konstanta mängd med vilken uppmätta avläsningar skiljer sig från det "sanna" värdet.
Med den informationen, ett centralt standardlaboratorium som NIST skulle fullt ut kunna karaktärisera en eller flera DUT:s inneboende egenskaper och distribuera enheterna till andra laboratorier, som skulle använda dem för att jämföra resultat och bestämma, till exempel, om avläsningarna var snedställda på grund av instrumentrelaterade mätfel.
Tidigare i år, NIST förvärvade en ny position och hastighetstabell som är tillräckligt stor för att tillåta mätningar på hela produkter som har accelerometrar installerade. "Vårt första gimbalsystem var ett mindre instrument som var användbart för att göra statiska mätningar, "Säger Gaitan.
"Men nu kan vi göra dynamiska mätningar på objekt så stora som en mobiltelefon. Vi kan ställa in den på stabil rotation som en skivspelare, och vi kan påskynda rotationshastigheten. Det gör att vi kan göra mätningar över 1g tyngdacceleration och mäta acceleration genom rotation. "