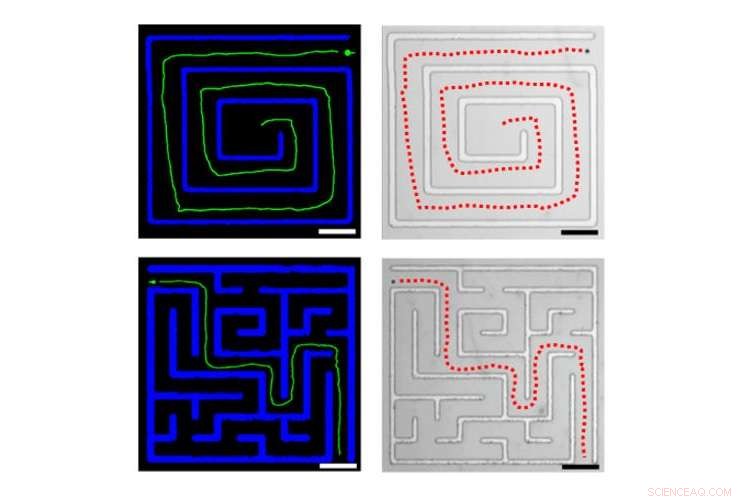
Banor för ett mikrofordon genom labyrinter. Vägen planeras av ett artificiellt intelligenssystem och mikrofordonet styrs av magnetfält. Kredit:Li et al. ©2017 American Chemical Society
(Phys.org) – I en ny studie, forskare har utvecklat mikroskalaversionen av självkörande fordon:en 5-μm sfärisk mikromotor som autonomt navigerar sig genom mikrotrafiken längs en mikrolabyrint för att nå sin slutdestination. Forskarna förväntar sig att dessa "smarta mikrofordon" har potentiella tillämpningar i biomedicinska uppgifter, som att leverera läkemedel till tumörceller samtidigt som man undviker friska celler.
Forskarna, ledd av Longqiu Li vid Harbin Institute of Technology i Kina, och Joseph Wang vid University of California San Diego i USA, har publicerat en artikel om de smarta mikrofordonen i ett färskt nummer av ACS Nano .
"Vi har bäddat in artificiell intelligens i en mikro/nanorobot, " berättade Li Phys.org . "Vi introducerar ett smart mikrofordon för exakt autonom navigering i komplicerade och dynamiskt föränderliga miljöer genom optimal vägplanering. I likhet med deras stora fordonsmotsvarigheter, den autonoma navigeringen av mikrofordon innebär kollisionsfri rörelse i dynamiska miljöer. "
Tills nu, mikro- och nanomaskiner har begränsats till navigering som använder ett slutet styrsystem, där maskinerna bara kan röra sig längs en fördefinierad väg. Den nya studien markerar den första demonstrationen av mikromaskiner som autonomt kan navigera komplexa, dynamiskt föränderliga miljöer, som de med andra rörliga mikromaskiner.
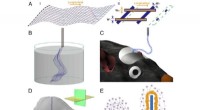
Den autonoma navigeringsprocessen består av tre huvudsteg. En CCD-kamera kopplad till ett mikroskop tar bilder och skickar dem till en funktionsextraktionsprocessor, som identifierar hinder och konstruerar en karta över miljön. Kartan skickas sedan som input till en artificiell intelligens (AI) -planerare, som använder en vägsökningsalgoritm och luddig logik för att bestämma den kortaste kollisionsfria vägen bland flera möjliga vägar till destinationen. AI-planeraren skickar sedan dessa färdriktningar till en magnetfältsgenerator, som orienterar ett magnetfält på ett sådant sätt att det styr mikrofordonet längs den kollisionsfria vägen.
AI-planeraren, som är hjärtat i det smarta navigationssystemet, kan också upptäcka när mikrofordonet driver från sin planerade väg, som kan uppstå på grund av förekomsten av buller. I dessa fall, AI -planeraren kan samtidigt mäta felet och leda tillbaka mikrofordonet till banan.
En av huvudapplikationerna för denna typ av smarta mikrofordon kan vara inom det biomedicinska området för uppgifter som sjukdomsdiagnostik, drogleverans, och precisionskirurgi. Att demonstrera, forskarna visade att mikrofordonet kan använda kameran för att känna av och skilja mellan cancerceller, röda blodceller, och blandade celler, genom att känna igen skillnader i deras storlek och form. AI-planeraren ser sedan cancercellerna som mål och de andra cellerna som hindren, och planerar en väg därefter.
"Vi vill tillämpa mikro-/nanorobotsystemen inom biomedicinska operationer och manipulation i nanoskala, " sa Li.
I framtiden, forskarna planerar att utveckla mer sofistikerade autonoma mikrofordon, med funktioner som autonom bromsning, "farthållare, körfältshållning, och förmågan att interagera med omgivningen.
© 2017 Phys.org