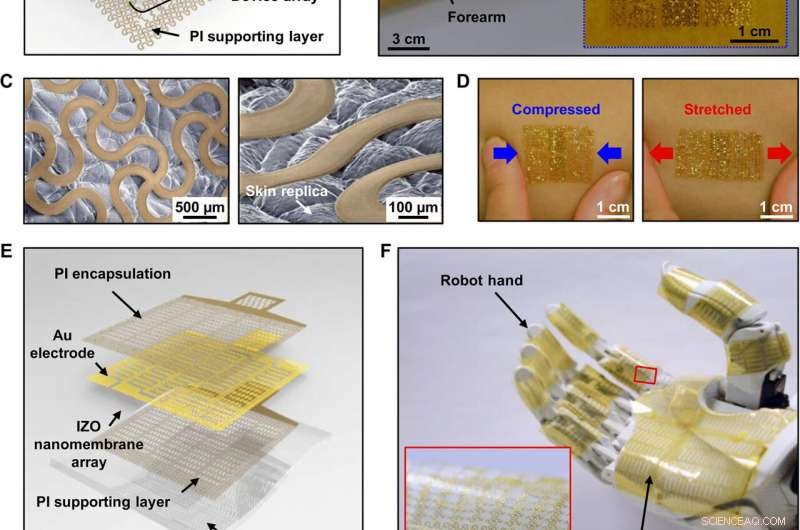
Ultratunna, töjbar, mekaniskt omärklig, multifunktionell HMI-enhet för människor och robotteknik. (A) Schematisk sprängvy av en ultratunn multifunktionell HMI-enhet. (B) Optisk bild av enheten på en mänsklig underarm. Infällt är en förstorad bild. (C) SEM-bild av enheten på en bit replikerad hud. (D) Optiska bilder av enheten på en mänsklig hud under mekanisk deformation:komprimerad (vänster) och sträckt (höger). (E) Schematisk sprängvy av temperatursensorgruppen för robothanden. (F) Optisk bild av temperatursensorgruppen på en robothand. Infällt är en förstorad bild. (G) SEM-bilder av temperatursensorgruppen. (H) Optiska bilder av temperatursensorgruppen på robothanden under mekanisk deformation:böjd (vänster) och sträckt (höger). Fotokredit:Kyoseung Sim, University of Houston. Kredit:Science Advances, doi:10.1126/sciadv.aav9653
Bärbara elektroniska människa-maskin-gränssnitt (HMI) är en framväxande klass av enheter för att underlätta interaktioner mellan människor och maskiner. Framsteg inom elektronik, material och mekanisk design har erbjudit vägar mot kommersiella bärbara HMI-enheter. Dock, befintliga enheter är obekväma eftersom de begränsar människokroppens rörelser med långsamma svarstider och utmaningar att realisera flera funktioner. I en färsk rapport om Vetenskapens framsteg, Kyoseung Sim och ett tvärvetenskapligt forskarteam inom materialvetenskap och teknik, maskinteknik, Biomedicinsk forskning, el- och datorteknik i USA och Kina, detaljerade utvecklingen av en ny polymer.
I arbetet, de konstruerade en sol-gel-på-polymer-bearbetad indium-zinkoxid-halvledarnanomembranbaserad ultratunn töjbar elektronikenhet. Fördelarna inkluderade multifunktionalitet, enkla tillverkningsprocesser, omärkligt slitage och robust gränssnitt. De multifunktionella bärbara HMI-enheterna sträckte sig från resistivt slumpmässigt åtkomstminne (ReRAM) för datalagring till bildande av fälteffekttransistorer (FET) som samverkar med omkopplingskretsar. Ytterligare funktioner inkluderar sensorer för hälsa och kroppsrörelseavkänning, och mikrovärmare för att leverera temperatur. Efter att ha testat de enskilda komponenterna för deras unika egenskaper, Sim et al. konstruerade HMI-enheterna som sömlösa bärbara enheter för människor och även som proteshud för robotar för att erbjuda intelligent feedback och bilda ett HMI-system (human-machine interface) med sluten slinga.
Wearable human-machine interfaces (HMI) fungerar som direkta kommunikationsvägar mellan människor och maskiner. Gränssnitten kan känna av fysiska eller elektrofysiologiska parametrar från bärarna och underlätta för maskinerna att utföra motsvarande funktioner. Den senaste utvecklingen inom elektronik, material och mekaniska konstruktioner har avancerade HMI-enheter. Sådana wearables är, dock, fortfarande halvmjuk och obekväm för sömlös integration på grund av oförmåga att deformeras och anpassa sig till en rad dynamiska mänskliga rörelser. Mjuka elektroniska material som perfekt matchar kraven av intresse erbjuder ett alternativ till att konstruera den töjbara, bärbara HMI-enheter. Dock, de mjuka gummiartade materialen har haft långsamma svarstider för att genomgå betydande hysteres vid cyklisk deformation. Jämförelsevis, oorganiska material kan uppvisa snabba svarstider och genomgå betydande hysteres för att användas som bärbar elektronik och sensorer.
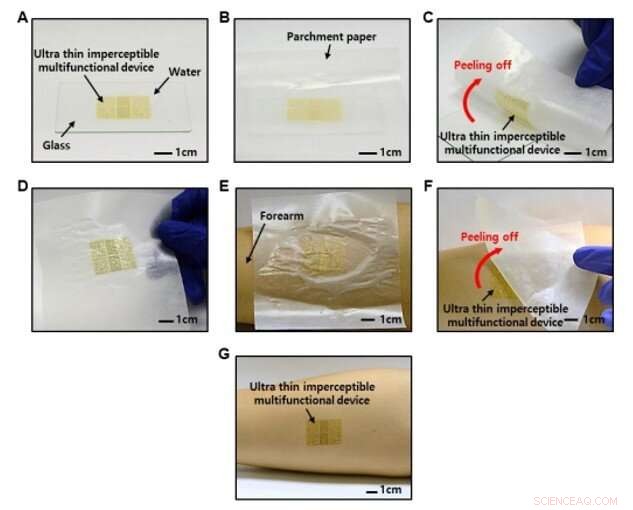
Överföra den ultratunna omärkliga HMI-enheten till den mänskliga underarmen. (A) En tillverkad anordning på glas med applicerat vatten. (B) Pergamentpapperslaminering ovanpå elektronik. (C) Hämtning av HMI-enheten genom att dra bort pergamentpapper. (D) En bild av HMI-enheten på pergamentpapper. (E) Laminering av pergamentpapper med HMI-enheten på underarmen. (F) Skala av bakplåtspappret. (G) En bild av den överförda HMI-enheten på underarmen. (Foto:Kyoseung Sim, University of Houston). Kredit:Science Advances, doi:10.1126/sciadv.aav9653
Unika materialegenskaper kan underlätta skrynkling, serpentin- och kirigami-former för att fungera som nyckelaktiverare för HMI-enheter med mjuk och töjbar karaktär. För att uppnå flera funktioner inklusive avkänning, växlande, stimulering och datalagring, dock, forskare måste fortfarande utveckla olika typer av elektroniska funktionsmaterial, tillsammans med heterogen integrationsteknik, såsom transfertryck. Sådana enheter är förknippade med komplexa tillverkningsprocedurer, inkompatibilitet av ingenjörskonst, låg skalbarhet och hög kostnad. Dessutom, att samarbeta med mänskliga och maskinella gränssnitt, materialvetare kräver en bredare förståelse av parametrarna för interaktion, utvärdering och kommunikation. Bärbara HMI-enheter krävs därför på både människor och maskiner för att effektivt bilda slutna kretslopp. Som ett resultat, forskning inom området robotmaterial syftar till att utveckla bärbara HMI-enheter för att täppa till de befintliga luckorna i tekniken.
I detta arbete, Sim et al. utvecklat en ultratunn, mekaniskt omärklig och töjbar HMI-enhet för att bäras på mänsklig hud och på en robot, att fånga fysisk data och erbjuda intelligent feedback, respektive, för att skapa ett HMI-system med sluten slinga. De utvecklade materialen utan att kombinera flera funktionella material, enheter eller överdrivna heterogena steg av integration. Enhetsdesignen på den ultratunna, slingrande, Open-mesh-konfiguration med mekanisk töjbarhet gjorde det möjligt för användaren att vara helt omedveten om enheten, samtidigt som det extraherade användbara signaler från användaren. Den bärbara enheten samlade in signaler från den mänskliga muskeln för att styra roboten direkt för att låta användaren känna förnimmelserna som robothanden upplever. Forskargruppen studerade tillsammans material och enhetsdesign, tillverkning och karakterisering för att demonstrera grundläggande aspekter av metalloxidnanomembranet för multifunktionella applikationer i HMI-enheter.
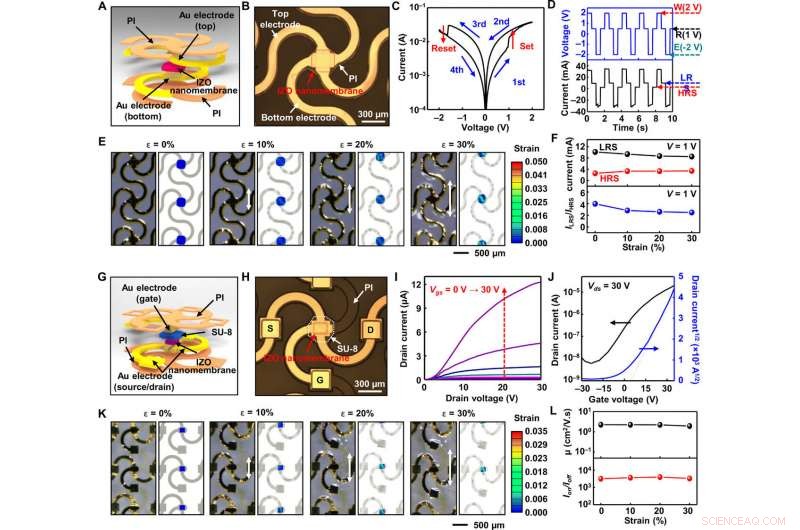
Egenskaper för ReRAM och FET. (A) Schematisk sprängvy av IZO nanomembran-baserade ReRAM. (B) Optisk mikroskopisk bild av ReRAM. (C) I-V-karakteristika för den bipolära omkopplingen av ReRAM. (D) WRER-cykel för ReRAM. (E) Sekventiella bilder av det IZO nanomembranbaserade ReRAM under stam och motsvarande FEA-resultat av IZO. (F) Ström vid LRS och HRS och ILRS/IHRS under påfrestning. (G) Schematisk sprängvy av IZO FET. (H) Optisk mikroskopisk bild av FET. (I) FET:ens utgångsegenskaper. (J) Överföringsegenskaper hos FET. (K) Sekventiella bilder av FETs under påfrestning och motsvarande FEA-resultat av IZO. (L) Beräknad fälteffektmobilitet för IZO och ION/IOFF hos FET under belastning. Kredit:Science Advances, doi:10.1126/sciadv.aav9653
Sim et al. komponerade HMI-enheten med en Indium Zinc Oxide (IZO) nanomembranbaserad ReRAM (random-access memory) array, FET (fälteffektiv transistor) array, distribuerade temperatursensorer, UV-sensorer, töjningssensorer och guld (Au)-baserade termiska simulatorer. De konstruerade alla enheter på ett tunt (~2 µm) polyimid (PI) lager genom spinnbeläggning på toppen av ett styvt glas som håller substrat för att möjliggöra en enkel frigöring av enheten att vara fristående. Efter många intrikata tekniska steg, de avslutade tillverkningen av enheten genom att doppa den i buffertoxidetsningsmedel (BOE) för att frigöra enheten från glasplattformen. Använda pergamentpapper, forskarna överförde sedan enheten till en mänsklig arm utan extra lim. De använde svepelektronmikroskopi för att visa att hudpolymeren inte genomgick delaminering vid kontakt med huden. För att bilda ett HMI-system med sluten slinga mellan människa och maskin, forskarna utvecklade på samma sätt en hudprotes bestående av poly(dimetylsiloxan) (PDMS) och en rad sensorer för att efterlikna sensoriska funktioner hos den mänskliga huden och implementerade den på en robothand.
Sim et al. utförde detaljerad karakterisering av den sol-gel-på-polymer-behandlade IZO nanomembranoxid-halvledaren, vilket var nyckeln till att förverkliga flera funktioner utan heterogen integration. Eftersom datalagringsenheter som minne var integrerade komponenter i bärbara HMI:er; forskarna konstruerade det IZO-nanomembranbaserade töjbara ReRAM med en Au/IZO/Au sandwich-struktur med PI (polyimid) inkapsling. Under tillräcklig spänning, de skapade syrejoner och syrevakanser för att bilda en ledande filament över de två elektroderna för drastisk strömövergång från högresistanstillstånd (HRS) till lågresistanstillstånd (LRS). När de applicerade en omvänd förspänning vid en specifik spänning, syrevakanserna neutraliserades, vilket gör att den ledande tråden brister och att strömmen minskar drastiskt. Sim et al. utförde skriv-läs-rader-skriv-cykler (WRER) och retentionstester för att bedöma tillförlitligheten hos det IZO nanomembranbaserade ReRAM, där resultaten visade stabil drift utan nedbrytning.
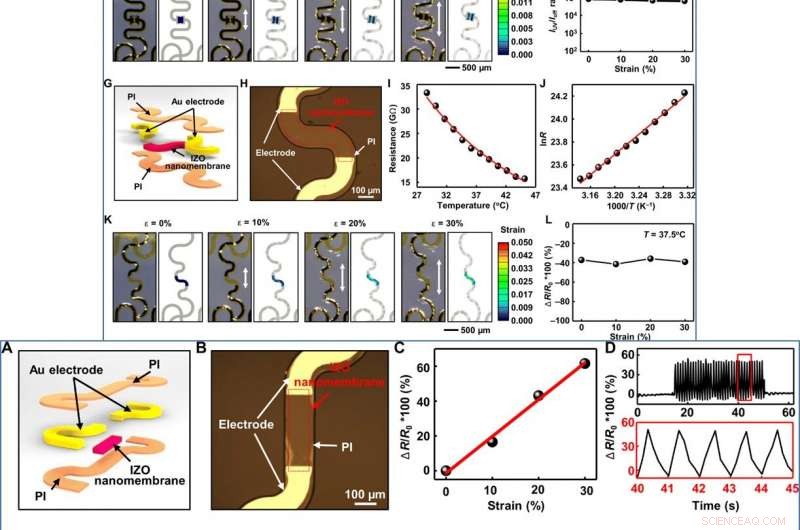
UPP:Egenskaper för UV- och temperatursensorer. (A) Schematisk sprängvy av den IZO nanomembranbaserade UV-sensorn. (B) Optisk mikroskopisk bild av UV-sensorn. (C) I-V-egenskaper hos UV-sensorn. (D) Kalibreringskurva för IZO UV-sensorn. (E) Sekventiella bilder av UV-sensorn under belastning och motsvarande FEA-resultat av IZO. (F) IUV/Idark för UV-ljus under belastning. (G) Schematisk sprängvy av IZO-temperatursensorn. (H) Optisk mikroskopisk bild av temperatursensorn. (I) Kalibreringskurva för temperatursensorn. (J) Plott av lnR mot 1000/T för temperatursensorn. (K) Sekventiella bilder av IZO-temperatursensorn under belastning och motsvarande FEA-resultat av IZO. (L) Relativ resistansförändring av temperatursensorn under belastning. UNDAN:Egenskaper för töjningssensor. (A) Schematisk sprängvy av IZO-töjningssensorn. (B) Optisk mikroskopisk bild av töjningssensorn. (C) Kalibreringskurva för töjningssensorn. (D) Relativ motståndsförändring av töjningssensorn under cyklisk stretching och avslappning. (E) Sekventiella bilder av töjningssensorn under belastning och motsvarande FEA-resultat av IZO. Kredit:Science Advances, doi:10.1126/sciadv.aav9653
De bekräftade den mekaniska belastningseffekten på enhetens prestanda genom att testa ReRAM under olika nivåer av mekanisk sträckning med hjälp av en skräddarsydd bår. Resultaten visade att halvledaren upplevde minimal och försumbar belastning när den sträcktes, återspeglar enhetens rationella design. Resultaten indikerade förmågan hos ReRAM-anordningen att fungera stabilt under mekanisk påfrestning utan avsevärd nedbrytning. FET:en som användes i enheten utgjorde på samma sätt en grundläggande byggsten för gränssnitt och switchelektronik för HMI:er.
Forskarna testade sedan den ultratunna UV-sensorn av den hudbärbara polymeren och dess förmåga att övervaka UV-exponering för tillämpningar för att minska risken för hudsjukdomar. Liknande, de testade effekterna av hudtemperatur, en viktig hälsoindikator genom att mäta motståndet hos den ultratunna sträckbara termistorn vid olika temperaturer. De beräknade temperaturkoefficienten för att vara jämförbar med kommersiellt tillgängliga skrymmande termistorer. Forskargruppen utvecklade också en IZO nanomembranbaserad töjningssensor för kommunikation mellan en människa och robot för att lyfta fram IZO-materialets mångsidighet. Sim et al. jämförde de experimentella resultaten med finita elementanalys (FEA) för att beräkna töjningsprofilen för IZO-avkänningsområdet under olika nivåer av mekanisk sträckning. Simuleringarna stämde väl överens med experimentresultaten.
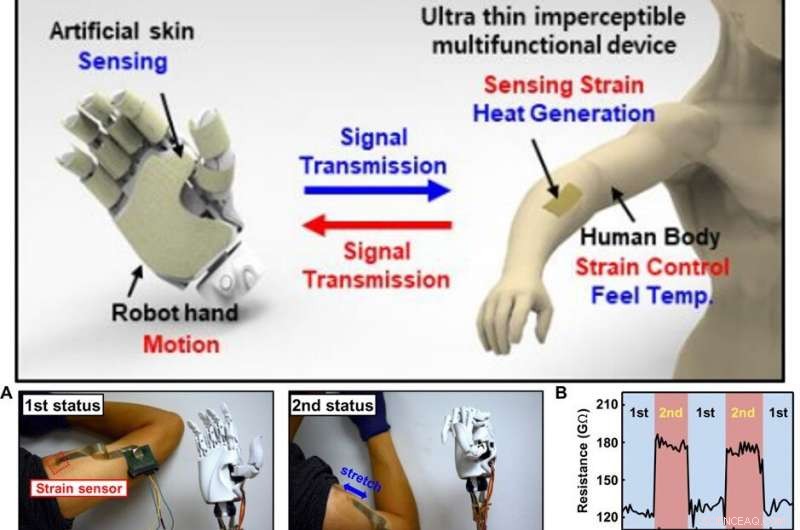
UPP:Schematisk illustration av en sluten loop HMI. UNDAN:Bärbar sluten-loop HMI. (A) Representativ bild av mänsklig rörelse för att styra robothanden. (B) Motståndsändring av belastningssensorn på den mänskliga huden under olika mänskliga rörelser. (C) Representativ bild av mänsklig rörelsehärmare. (D) Resistansförändring av töjningssensorn på mänsklig rörelsehärmning. (E) Representativ bild av robothanden, med temperatursensorn vidrör den mänskliga handen. (F) Motståndsändring av temperatursensorn på robothanden medan mänsklig hand håller roboten. (G) Schematisk sprängvy av den resistiva mikrovärmaren. (H) IR-temperaturkartläggning av mikrovärmaren. (I) Dynamisk temperaturförändring under olika pålagda spänningar. (J) Kalibreringskurva för mikrovärmaren. Fotokredit:Kyoseung Sim, University of Houston. Kredit:Science Advances, doi:10.1126/sciadv.aav9653
Efter att ha testat multifunktionsenhetens individuella funktioner, Sim et al. demonstrerade multifunktionaliteten hos de interaktiva HMI:erna med slutna slinga. När bärbara sensorer på människohuden upptäckte signaler som belastningsinducerad mänsklig rörelse, de detekterade signalerna kan styra robothandens rörelse. Till exempel, När forskargruppen placerade IZO-belastningssensorn på den mänskliga axeln upptäckte den belastning genom rörelse av den mänskliga armen eller när användaren fattade ett föremål. Parallellt, den protetiska huden baserad på IZO-temperatursensorn i robothanden detekterade temperaturen i den yttre miljön eller på det gripna föremålet för att bestämma den lämpliga spänningen som ska appliceras på en mjuk termisk stimulator på människohuden för att överföra känslan. På grundval av en rad sådana samordnade interaktioner, forskarna skapade ett interaktivt slutna HMI-system.
På det här sättet, Kyoseung Sim och kollegor konstruerade ett sol-gel-på-polymer-bearbetat IZO-metalloxidnanomembran och visade sin mångsidighet i förhållande till ultratunna mjuka minnesenheter, transistorer, temperatursensorer, töjningssensorer och UV-sensorer. De bildade den multifunktionella enheten samtidigt i en enda stegsprocess utan någon heterogen integration. De kombinerade ultratunna töjbara elektronikaktiverade bärbara sensorerna, hudprotes och manöverdon för gränssnitt mellan människa och robot bevisade genomförbarheten av det slutna HMI-systemet. En sådan installation kommer att bana väg för kostnadseffektiva, skalbar tillverkning och bärbara HMI-enheter som kan integreras sömlöst med användaren. Forskarna föreställer sig att det bärbara HMI kommer att bli en viktig teknik med förbättrade möjligheter, komfort och bekvämlighet för effektiv samverkan mellan maskiner och människor.
© 2019 Science X Network