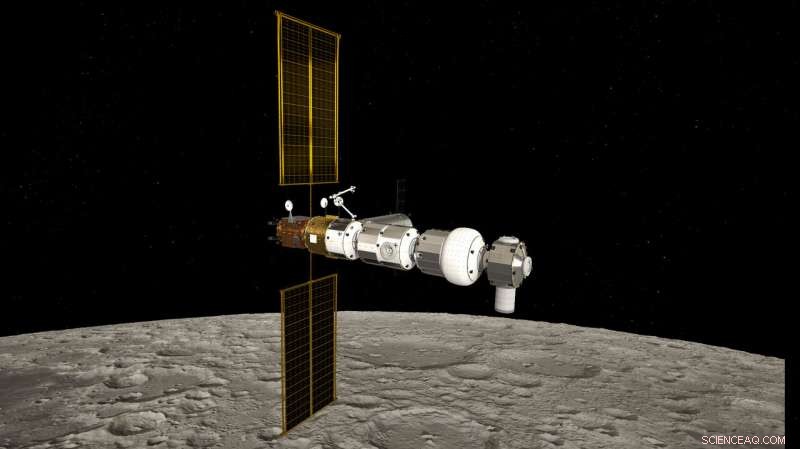
Konstnärens intryck av porten över månen. Gateway är nästa struktur som lanseras av partnerna till den internationella rymdstationen. Kredit:ESA/NASA/ATG Medialab
Den här hösten ser vi ett antal experiment som styr robotar på långt håll, med ESA-astronaut Luca Parmitano som styrde en robot i Nederländerna och ingenjörer i Tyskland som styrde en rover i Kanada.
Föreställ dig att titta ner på månen från porten när du förbereder dig för att landa nära en månbas för att utföra experiment, men du vet att basen behöver underhållsarbete på det livsuppehållande systemet som kommer att ta dagar. Det skulle vara bättre att behålla basen från omloppsbana så att astronauterna kan komma direkt till arbetet en gång på månen.
Partnerskap mellan människa och robot är kärnan i ESA:s prospekteringsstrategi, vilket inkluderar att förbereda sig för scenarier som detta genom att skicka robotscouter till månen och planeterna, hand i hand med astronauter som styr dem från omloppsbana.
Meteron-projektet bildades för att utveckla den teknik och det kunnande som behövs för att köra rovers under dessa svåra förhållanden. Den täcker alla aspekter av verksamheten, från kommunikation och användargränssnitt till ytoperationer och till och med att koppla robotarna till astronauterna genom känsel.
Historisk robotstyrning
Det första experimentet ägde rum 2012 när NASA-astronauten Sunita Williams kontrollerade en LEGO-rover i Tyskland för att testa ett nyutvecklat "rymdinternet" – vilket bevisade att det är möjligt att styra en rover från en omloppsbana. Detta är ingen lätt bedrift eftersom signaler från den internationella rymdstationen gör en rundresa på 144 400 km. När utposten rör sig runt jorden i 29 000 km/h, signaler färdas upp till nästan 36 000 km höga satelliter och sedan ner till en amerikansk markstation i New Mexico, via NASA Houston och genom en transatlantisk kabel till Europa — och tillbaka.
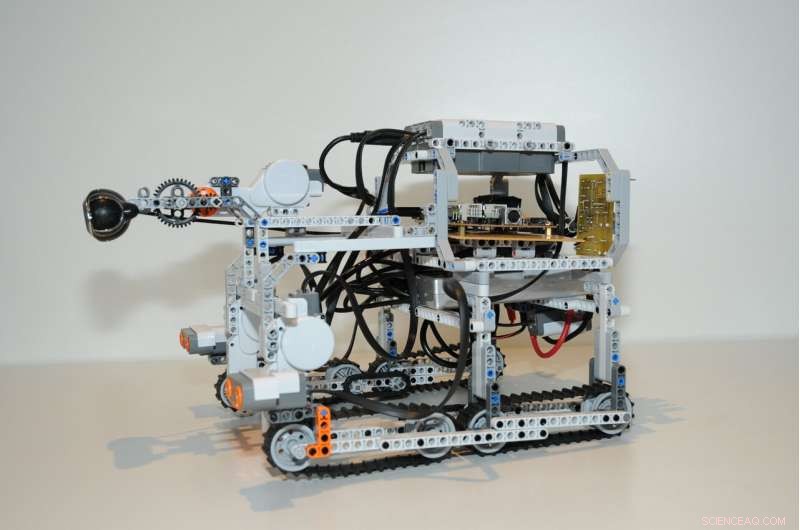
Mocup är en av testroverna i ESA:s initiativ för framtida uppdrag till månen, Mars och andra himlakroppar. Kredit:European Space Agency
Parallellt, ingenjörer arbetade med att designa användargränssnittet för astronauterna för att styra robotarna. Eftersom detta är ett nytt område, aspekter som kameravyer, joysticks och även om man skulle använda en traditionell dator eller pekskärm måste övervägas och utformas.
Från de första testerna, större rovers som Eurobot styrdes från rymden medan team på ESA:s tekniska center i Nederländerna började experimentera med haptisk feedback, låter astronauter känna vad roboten rör vid. 2015, ett historiskt "handskakning" i omloppsbana inträffade mellan NASA-astronauten Terry Virts och en person på jorden över 5000 km bort.
Bara några månader efter den milstolpen, ESA-astronaut Andreas Mogensen styrde en rover för att sätta in en metallpinne i ett runt hål i en "uppgiftstavla" med millimeterprecision, simulerar reparation av en elektrisk anslutning.

ESA-astronauten Andreas Mogensen förbereder sig för sin 10-dagarsflygning till den internationella rymdstationen i september där han kommer att testa många nya teknologier. Han träffade Eurobot-rovern på ESA:s tekniska center i Noordwijk, Nederländerna, på tisdag för första gången. Kredit:ESA–J. Harrod
Testerna har fortsatt med ökande trohet. Förra veckan, ett markbaserat ESA-team tillsammans med den kanadensiska rymdorganisationen övade nattliga operationer. Experter vid ESA:s uppdragskontrollcenter i Darmstadt, Tyskland, kontrollerade CSA:s Juno-rover från andra sidan Atlanten, med ett vetenskapsteam vid ESA:s tekniska center ESTEC i Nederländerna som ger råd – en liknande uppställning används för dagliga internationella rymdstationsoperationer.
Det fyra timmar långa experimentet såg Juno färdas över två kilometer och täckte sex "waypoints" samtidigt som han tog skanningar av sin omgivning och inspekterade områden av vetenskapligt intresse. Inget av lagen i Europa visste exakt vad de skulle förvänta sig, precis som de skulle göra under ett verkligt månuppdrag.
"MAGIC-experimentet var verkligen en stor framgång, säger Kim Nergaard, Chef för avancerade uppdragskoncept vid ESA:s ESOC operationscenter i Darmstadt, Tyskland.
"Vi ställdes naturligtvis inför vissa problem - vid ett tillfälle var rovern överdrivet försiktig med en relativt liten sten - men vi nådde vår slutpunkt inom den tilldelade tiden och uppnådde alla mål vi satte oss för, lär sig mycket på vägen."
Få alltid att falla på plats
I november 2019, Meteron-projektet kommer att sätta ihop alla element när ESA-astronauten Luca Parmitano driver Interact-rovern i Nederländerna från den internationella rymdstationen.
Detta experiment, döpt till Analog-1, kommer att kombinera all know-how från ett decennium av Meteron-projektet till ett fullskaligt test:köra en rover från omloppsbana för att samla in vetenskapliga prover av månsten. Luca kommer att ha ett team på Europas astronautcenter i Köln, Tyskland, agerar som uppdragskontroll och kommer att kunna känna vad Interact känner med hjälp av haptisk feedback-teknik som utvecklats av ESA:s Telerobotics Laboratory.