Fruktflugans bots vinge. Upphovsman:Bhushan &Tomlin.
Forskare vid University of California (UC) Berkeley har nyligen designat två mikrobotar i insektsskala, en som hoppar och en annan som klappar sina konstgjorda vingar. Dessa robotdesigner, presenteras i två artiklar förpublicerade på arXiv, efterlikna verkliga biologiska beteenden som observerats hos insekter. De två mikrobotarna, kallas fruktflugebot och hoppande µbot, utvecklades av Ph.D. student Palak Bhushan som en del av sin avhandling under överinseende av sin professor, Claire Tomlin.
I framtiden, små robotar kan ha många viktiga tillämpningar, hjälpa människor i uppgifter som fjärranalys, letar efter överlevande efter naturkatastrofer, och utforskning av rymden. Faktiskt, mikrobotar har flera gynnsamma egenskaper, inklusive deras ringa storlek, insektsliknande manövrerbarhet och enklare navigering i utmanande terräng.
"Robustheten i tuff terräng ökar i allmänhet ju mindre en bot interagerar med miljön, "Berättade Bhushan och Tomlin TechXplore . "Reklamblad och hoppare (t.ex. flugor, gräshoppor, etc.) minimera denna interaktion genom att flyga/hoppa över hindren och till deras nästa destination, till skillnad från myror som måste gå över varje liten bula. Flygblad är mer relevanta för jorden och andra planeter med tät atmosfär, medan hoppare är mer relevanta för platser med försumbar eller ingen atmosfär och lägre gravitation."
Den första roboten som utvecklats av forskarna, som de refererar till som fruktflugan, är det första sub-milligram vingfordonet som någonsin utvecklats som effektivt efterliknar insektsvingarnas kinematik. De flesta små flaxande vingmikrobotar hittills är på 100 mg-massskalan. I naturen, dock, små flygande insekter (t.ex. fruktflugor) är i en 1 mg massskala, och vissa kan vara ännu mindre.

Vinghöjden för 'fruktflugan', toppvy. Kredit:Bhushan &Tomlin.
"Motivationen bakom utvecklingen av just denna mikrobot var att överbrygga storleksgapet mellan det som har gjorts och det som är möjligt, " förklarade forskarna. "Vårt huvudmål var att demonstrera flaxande vingrörelser i denna storleksskala med hjälp av motorer och mekanismer ombord, men med extern elektrisk kraft."
Små flygande insekter genererar vanligtvis lyft genom att utföra stora vingslag. En av de viktigaste utmaningarna för Bhushan och Tomlin när de utvecklade denna robot var att skapa små ställdon som inte kan generera tillräckligt stora rotationer för att driva de konstgjorda vingarna.
"Tidigare arbeten använder små rotationsmotorer och förstärker sedan denna rörelse till stora rotationer med hjälp av en förstärkningsmekanism, Bhushan och Tomlin förklarar. "Funktionsstorlekarna i dessa förstärkningsmekanismer går ner till 70um, även för bots i 100 mg-skala. Att helt enkelt skala ner designen med 100x skulle leda till en ännu mindre motorrörelse som i sin tur skulle kräva ännu lägre funktionsstorlekar i förstärkarmekanismen, vilket inte är genomförbart."
För att ta itu med problem i samband med att skala ner designen av mikroboten, forskarna skapade en motor med stor rotation som inte kräver några förstärkningsmekanismer för att fungera. De uppnådde detta genom att utveckla en torsionsfjäder i vilken små rotationer av individuella fribärare lägger ihop för att producera en stor rotation när de drivs med resonans.

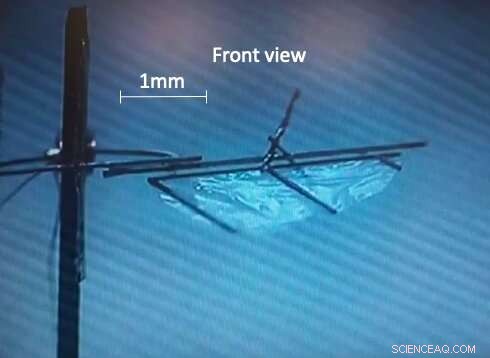
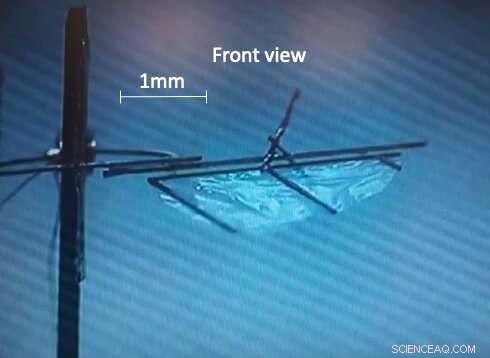
Vinghöjden för 'fruktflugan', frontvy. Kredit:Bhushan &Tomlin.
Med forskarnas design, den flygande robotens funktionsstorlekar kan gå ner till endast 100um, även på 1 mg-skalan. Anmärkningsvärt, deras fruktfluga bot kan tillverkas inom en relativt kort tid. Dessutom, dess låga driftspänningar (dvs. 70mV) borde göra det enkelt att testa och installera i framtiden.
Den andra mikroboten som utvecklats av forskarna är en hoppande bot som mäter 17 mm x 6 mm x 14 mm i storlek och väger 75 milligram. Den tjudrade versionen av denna robot kan hoppa 6 gånger per minut, landar perfekt på fötterna. För att hoppa upp med 8 mm i höjd, boten förbrukar cirka 6,4 mW ström.
Precis som fruktflugans bot, denna lilla robot är den minsta i sitt slag med sina möjligheter, åtminstone vad gäller forskarna. Faktiskt, den minsta hopprobot som rapporterats i tidigare studier har en inbyggd strömkälla som väger cirka 300 mg och bara kan hoppa en gång innan dess kemiska kraftkälla är slut.
"Vi hade som mål att utveckla något i massskalan under 100 mg som kunde utföra repeterbara hopp, " sa forskarna. "Observera att här, eftersom vi är i en mycket större skala jämfört med fruktflugbotten, vi kan vara mer ambitiösa och därmed ha en inbyggd strömkälla, också."
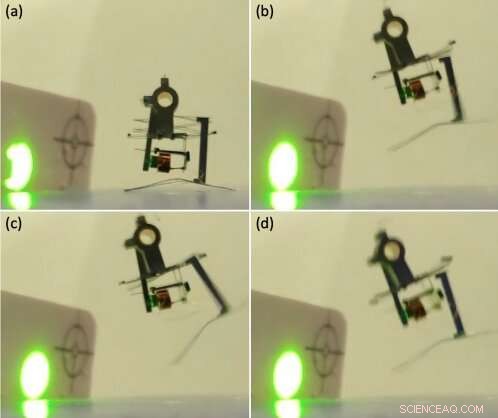
Den hoppande µboten utför ett hopp med laserkraft. Upphovsman:Bhushan &Tomlin.
Små hoppande insekter trycker vanligtvis marken snabbt med sina ben medan de utför ett hopp. Detta momentana effektbehov är alldeles för högt för att kunna reproduceras med en inbyggd motor. För att övervinna denna utmaning, tidigare studier har använt motorer för att lagra energi i en mekanism ombord och sedan snabbt frigöra denna energi, som gör att roboten kan utföra hopp. I deras studie, forskarna bestämde sig också för att använda detta tillvägagångssätt.
"Motorer är tunga, svåra att tillverka i liten skala, och kräver speciella styrsignaler för att styra dem, " sa Bhushan och Tomlin. "För att förenkla tillverkning och kontroll, vi säkerställde att vår design kan fungera med en enda motor genom att få de andra nödvändiga funktionerna att ske passivt, plus att vi designar vår motor för att fungera med enkla PÅ/AV-styrsignaler för att fungera."
I hoppboten utvecklad av Bhushan och Tomlin, en enda motor genererar en kontinuerlig rotationsrörelse genom att ackumulera små rotationer. Denna rörelse används sedan för att linda ett snöre som är utformat för att dra en fjäder i en energilagringsmekanism. När energin når en specifik tröskel, mekanismen frigör snabbt robotens lagrade energi, vilket i slutändan låter den hoppa.
"Det enkla kontrollkravet för vår motor gör att vi kan driva den med hjälp av 1 mg fotovoltaiska celler som producerar ström när en infraröd laser lyser på dem-men denna strömkälla är bara en platshållare för framtida mikrobatterier när de blir tillgängliga, ", tillade forskarna.

Den hoppande µboten. Kredit:Bhushan &Tomlin.
De flesta befintliga bots i 100 mg-skala använder piezoelektriska och elektrostatiska ställdon som kräver höga spänningar på 200-5000V för att fungera. Detta gör att de ofta kämpar med de tunga och ineffektiva spänningsförstärkande kretsarna som används för att driva dem. Enligt forskarna, detta är den främsta anledningen till att mycket få helt bundna mikrobotar framgångsrikt har skapats hittills.
"Vi har framgångsrikt designat nya elektromagnetiska ställdon, som är ett magnet plus spolsystem, precis som i dina hörlurar, som behöver låga spänningar för att fungera – endast 0,07V för fruktflugeboten, och 0,8V för hoppande bot, "Bhushan och Tomlin sa." Således, när vi kommer att ha bra mikrobatterier i framtiden (det har vi inte just nu), våra bots kommer att vara mycket lättare och förbruka mycket lägre ström för att fungera."
För att fungera effektivt, alla bots i 1 mg-skala, samt flera robotar i 100 mg-skala, kräver en speciell "kontrollerad" miljö, kännetecknas till exempel av ett förändrat yttre magnetfält, en kokplatta eller en vibrerande platta. Manöverdonen som används av denna fruktflugebot och hoppande bot, å andra sidan, är ombord, Därför fungerar dessa små robotar också bra i vanliga miljöer.
Imponerande, forskarna kunde skapa den minsta vingspännande enheten som hittills rapporterats, som har samma massa som en fruktfluga. De designade också framgångsrikt den lättaste obundna hoppande boten med en inbyggd strömkälla som någonsin utvecklats hittills.
Vingflaggande robotvinge. Kredit:Bhushan &Tomlin.
För närvarande, batterier kan fortfarande inte stödja flygande robotar i skala 100 mg, Därför kan det ta lite tid för forskarna att framgångsrikt driva sin flygande bot i 1 mg-skala. Dessutom, botens motor har en effekteffektivitet på 0,7 procent, medan en fruktflugas muskler har en effektivitet på 17 procent.
I deras framtida arbete, forskarna planerar att fokusera på utvecklingen av effektivare motorer, för att förbättra sin design ytterligare och förbereda sig för när batterier som är små nog att stödja deras bot äntligen släpps. De skulle också vilja skapa sensorer och kontroller med låg effekt under 0,1 mg, eftersom detta skulle göra det möjligt för dem att göra sin fruktfluga bot autonom.
"När det gäller hopproboten, vi planerar att lägga till en horisontell komponent till lanseringshastigheten som sedan kan hjälpa boten att navigera runt, " Bhushan och Tomlin förklarade. "Med tanke på de låga effektkraven för denna bot och en större storlek jämfört med fruktflugsboten, vi borde också kunna lägga till befintliga batterier för att få den att utföra helt självförsörjande hopp."
© 2019 Science X Network














