På den här bilden, ingenjörer testar kameror på toppen av Mars 2020-roverns mast och främre chassi. Bilden togs den 23 juli, 2019, i rymdfarkostanläggningens High Bay 1 vid NASA:s Jet Propulsion Laboratory i Pasadena, Kalifornien. Kredit:NASA/JPL-Caltech
Utrustad med visionära vetenskapliga instrument, Mars 2020-rovern genomgick en "ögonundersökning" efter att flera kameror installerats på den. Rovern innehåller en armada av bildfunktioner, från vidvinkel landskapskameror till smalvinklar högupplösta zoomobjektivskameror.
"Vi slutförde maskinseendekalibreringen av de framåtriktade kamerorna på rovern, sa Justin Maki, chefsingenjör för bildbehandling och bildforskaren för Mars 2020 vid JPL. "Denna mätning är avgörande för korrekt stereoseende, vilket är en viktig egenskap hos fordonet."
För att utföra kalibreringen, 2020-teamet avbildade måltavlor som har rutnät med prickar, placeras på avstånd från 1 till 44 yards (1 till 40 meter) bort. Måltavlorna användes för att bekräfta att kamerorna uppfyller projektets krav på upplösning och geometrisk noggrannhet. Kamerorna som testades inkluderade två Navcams, fyra Hazcams, SuperCam och de två Mastcam-Z kamerorna.
"Vi testade varje kamera på framsidan av roverchassit och även de som är monterade på masten, ", sa Maki. "Att karaktärisera den geometriska inriktningen av alla dessa bildapparater är viktigt för att köra fordonet på Mars, manövrera robotarmen och noggrant rikta in roverns laser."
Under de kommande veckorna, bildapparaterna på baksidan av roverkroppen och på tornet i slutet av roverns arm kommer att genomgå liknande kalibrering.

Ingenjör Chris Chatellier står bredvid en måltavla med 1, 600 punkter. Tavlan var en av flera som användes den 23 juli, 2019, i rymdfarkostanläggningens High Bay 1 vid NASA:s Jet Propulsion Laboratory i Pasadena, Kalifornien, för att kalibrera de framåtriktade kamerorna på Mars 2020-rovern. Kredit:NASA/JPL-Caltech
Monterad på roverns fjärravkänningsmast, Navcams (navigationskameror) skaffar panoramabilder i 3D som stöder ruttplanering, robotarmsoperationer, borrning och provtagning. Navcams kan arbeta tillsammans med Hazcams (kameror för att undvika risker) monterade på den nedre delen av roverchassit för att ge kompletterande vyer av terrängen för att skydda rovern mot att gå vilse eller krascha in i oväntade hinder. De kommer att användas av programvara som gör det möjligt för Mars 2020-rovern att köra själv över Mars-terrängen.
Tillsammans med dess laser och spektrometrar, SuperCams imager kommer att undersöka Mars stenar och jord, söker organiska föreningar som kan relateras till tidigare liv på Mars. Roverns två Mastcam-Z högupplösta kameror kommer att fungera tillsammans som en multispektral, stereoskopiskt bildinstrument för att förbättra Mars 2020-roverns kör- och kärnsamplingsmöjligheter. Mastcam-Z-kamerorna kommer också att göra det möjligt för vetenskapsteammedlemmar att observera detaljer i stenar och sediment var som helst inom roverns synfält, hjälpa dem att pussla ihop planetens geologiska historia.
JPL bygger och kommer att hantera driften av Mars 2020-rovern för NASA Science Mission Directorate vid byråns högkvarter i Washington. NASA kommer att använda Mars 2020 och andra uppdrag, inklusive till månen, att förbereda för mänsklig utforskning av den röda planeten. Byrån avser att etablera en varaktig mänsklig närvaro på och runt månen till 2028 genom NASA:s Artemis månutforskningsplaner.
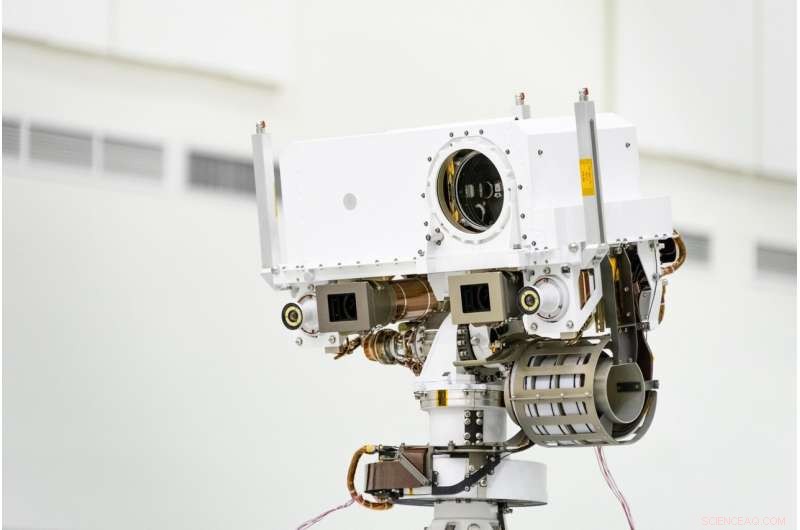
Denna bilden, tagen i rymdfarkostanläggningens High Bay 1 vid Jet Propulsion Laboratory i Pasadena, Kalifornien, den 23 juli, 2019, visar en närbild av huvudet på Mars 2020:s fjärranalysmast. Masthuvudet innehåller SuperCam-instrumentet (dess lins är i den stora cirkulära öppningen). I de grå rutorna under masthuvudet finns de två Mastcam-Z-bilderna. På de yttre sidorna av dessa bildapparater finns roverns två navigeringskameror. Kredit:NASA/JPL-Caltech