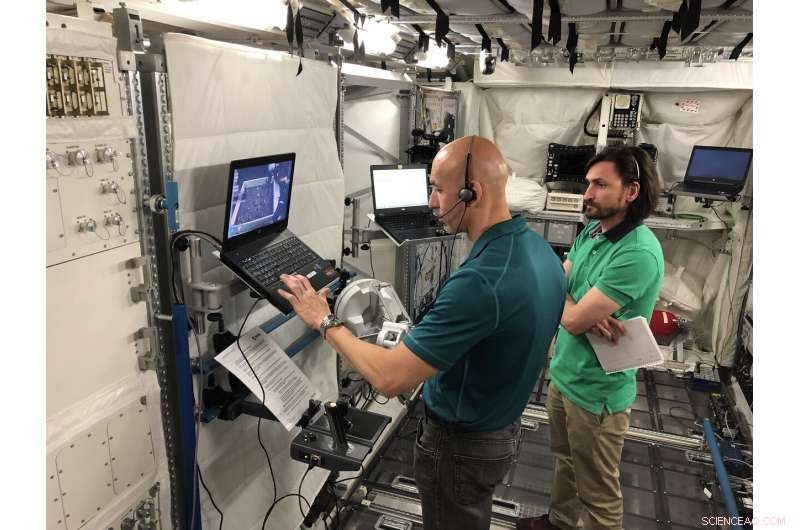
ESA-astronauten Luca Parmitano förbereder sig för ANALOG-1-experimentoperationer på marken i European Astronaut Center i Köln, Tyskland. Undersökningen kommer att kräva att han fjärrstyr en jordbaserad rover från rymdstationen. Kredit:ESA
Astronauter kunde en dag fjärrstyra månen och Mars rovers från omloppsbana. Ett kommande test ombord på den internationella rymdstationen kan hjälpa till att göra detta till en möjlighet. I november, ESA (European Space Agency) kommer att genomföra ett experiment i omloppsbana som kallas ANALOG-1 för att se om stationsbesättningar, forskare på marken och ny teknik kan samarbeta för att guida en rover på ett simulerat månuppdrag.
Detta projekt undersöker hur effektivt en astronaut på den internationella rymdstationen kan köra en rover på en månliknande terräng på jorden. Rovern har till uppgift att samla sten- och jordprover, sedan på distans undersöka proverna.
"Detta är ett potentiellt vetenskapligt scenario under framtida uppdrag till månen och Mars, sa William Carey, ESA-forskare och huvudutredare för ANALOG-1-experimentet. "Rymden är en så hård plats för människor och maskiner. Framtida utforskning av solsystemet kan innebära att man skickar robotutforskare för att testa vattnet på okända planeter innan man skickar människor."
Fjärrstäng
ANALOG-1 är det sista steget i ESA:s pågående METERON-projekt (Multi-purpose End To End Robotics Operations Network), som är ett initiativ för att utveckla och testa robotik, kommunikations- och operationsinnovationer som astronauter kan använda för att utforska solsystemet.
Historiskt sett, rovers som utforskar andra planeter har styrts med förprogrammerad mjukvara och av forskare som skickar kommandon från jorden som tar lång tid att nå robotarna. Dessa tillvägagångssätt fungerade tillräckligt bra för att avsevärt förbättra vår kunskap om andra världar, men de kan göra det svårt att arbeta snabbt, ändra planer eller snabbt anpassa sig till oväntade situationer.
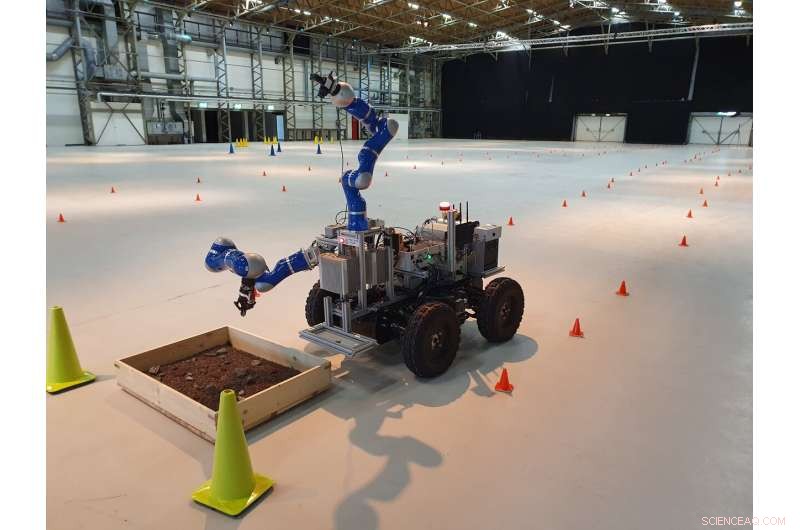
ANALOG-1 Interact-rovern som ligger nära European Space Research and Technology Center i Nederländerna kontrolleras av en surrogatastronaut baserad på European Astronaut Center i Tyskland. Konerna markerar en rutt som rovern måste följa för att komma till provplatsen. Kredit:ESA
Carey och hans ESA-team misstänker att en bättre metod kan vara att placera astronauter i omloppsbana runt utforskningsplatser där de snabbt kan kommunicera med rovern. Med en närliggande astronaut vid roverns kontroller, forskare kan mer effektivt utforska ett planerat mål, dra nytta av en överraskningsmöjlighet eller snabbt hantera ett problem.
"Ett antal rymdorganisationer har tittat på ett sådant scenario för utforskning av planetariska kroppar - särskilt för Mars, ", sade Carey. "Tillvägagångssättet kan avsevärt öka den vetenskapliga avkastningen på dessa uppdrag, samt erbjuda ett sätt att undvika potentiell kontaminering från människor som landar på ytan innan vi kan svara på frågor om existerande eller tidigare liv på Mars."
Resultaten av experimentet kan vara av särskilt värde för NASA när de förbereder sig för att utforska månen från det planerade rymdskeppet Gateway som en del av Artemis-programmet, där NASA kommer att gå vidare till månen och vidare till Mars.
Inom räckhåll
Under det två timmar långa experimentet, ESA-astronauten Luca Parmitano kommer att använda en arbetsstation ombord på det kretsande laboratoriet för att försöka styra en fjärrstyrbar rover och dess arm medan den korsar en månliknande yta nära Noordwijk, en stad i Nederländerna. Parmitano kommer att köra roboten med hjälp av ett specialiserat datorsystem och kommer att vägledas av forskare som kommunicerar med honom på marken. Han kommer också att använda en toppmodern Sigma 7 "joystick" som gör det möjligt för astronauten att känna av vad roverns arm stöter på.
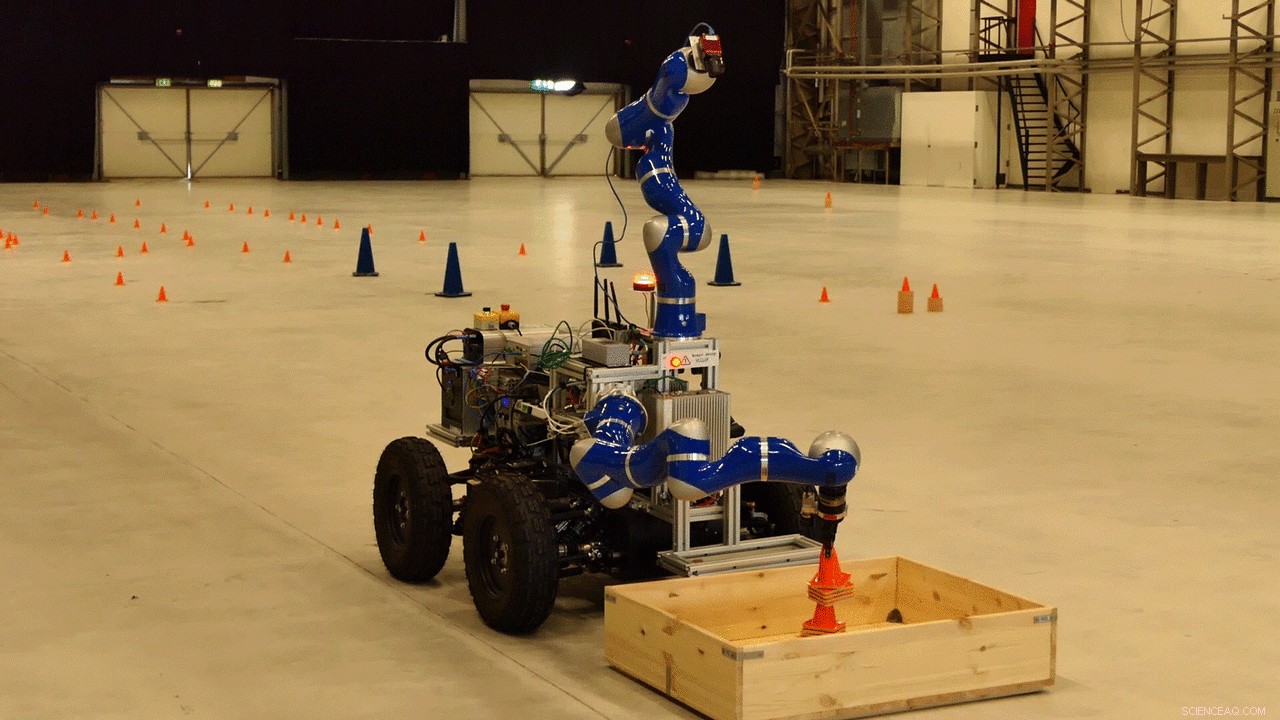
Roveren som kommer att användas som en del av ESA ANALOG-1-experimentet flyttar koner inuti provlådan som kommer att innehålla stenar under experimentet. Kredit:ESA
"Kraftåterkopplingen gör det möjligt för operatören att känna vad roboten känner, " sa ESA:s robottekniker Thomas Krueger. "T.ex. om roboten vidrör ett ömtåligt föremål, den mäter och överför information tillbaka till användaren, som sedan känner dess känslighet på Sigma 7 joystick. De kan då manövrera armen mer försiktigt än med en vanlig joystick."
Parmitano kommer att använda joysticken för att styra robotens arm för att ta prover av sten och jord tillbaka på jorden. Forskare förväntar sig att han kan möta ytterligare svårigheter på grund av hur människokroppen reagerar på rymden. Forskning har visat att mikrogravitation kan försämra en astronauts känsel eller känsel, såväl som förmågan att spåra rörliga föremål – som båda är avgörande i denna undersöknings uppgift.
Utvärdera den aktuella uppgiften
När experimentet är klart, forskare på plats kommer att utvärdera hur väl robotstyrsystemen fungerade och undersöka Parmitanos förmåga att driva rover under inverkan av mikrogravitation. De kommer också att observera hur väl Parmitano och vetenskapsteamet på jorden kunde kommunicera för att fatta beslut och planera för att kontrollera rovern.
"Robotar har förmågan att utöka vår närvaro på andra världar och öka vår utforskningseffektivitet, " sa ESA:s projektledare Kjetil Wormnes. "Resultaten av ANALOG-1 kommer att hjälpa oss att bestämma det mest effektiva sättet att samarbeta med robotar för att förbereda oss för vår framtida utforskning av månen."