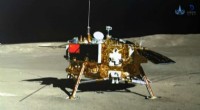
NUI sänks ner i Egeiska havet innan det kastar sig till ett djup av 500 meter för att utforska vulkanen Kolumbo. Kredit:Evan Lubofsky/Woods Hole Oceanographic Institution
WHOI:s robot, Nereid Under Ice (NUI), provar en fläck av sediment från det mineralrika golvet i vulkanen Kolumbo utanför Santorini Island, Grekland. Detta är det första kända automatiserade provet som tagits av en robot i havet.
Ett fjärrstyrt hybridfordon utvecklat av Woods Hole Oceanographic Institution (WHOI) tog det första kända automatiserade provet utfört av en robotarm i havet. Förra månaden, ett internationellt team av forskare använde en av WHOI:s undervattensrobotar, Nereid Under Ice (NUI), att utforska vulkanen Kolumbo, en aktiv ubåtsvulkan utanför Greklands berömda Santorini-ö.
"För ett fordon att ta ett prov utan att en pilot körde det var ett stort steg framåt, " säger Rich Camilli, en associerad forskare vid WHOI som leder utvecklingen av automationsteknik som en del av NASAs tvärvetenskapliga forskningsprogram Planetary Science and Technology from Analog Research (PSTAR). "Ett av våra mål var att kasta ut joysticken, och vi kunde göra just det."
Precis som med självkörande bilar, att lämna över ratten till en datoralgoritm kan vara oroande. Detsamma gäller havsrobotar, speciellt när de behöver arbeta i knepiga och farliga miljöer. Camilli var en del av ett internationellt team av forskare på en expedition som syftade till att lära sig om livet i det hårda, kemiskt belastad miljö i Kolumbo, och även utforska i vilken utsträckning forskare kan lämna över kontrollerna till havsrobotar och låta dem utforska utan mänsklig inblandning.
Något mindre än en smart bil, NUI var utrustad med artificiell intelligens (AI)-baserad automatiserad planeringsprogramvara – inklusive en planerare som heter "Spock" – som gjorde det möjligt för ROV:en att bestämma vilka platser som skulle besökas i vulkanen och ta prover självständigt.
Gideon Billings, en gäststudent från University of Michigan vars avhandlingsforskning fokuserar på automatiserade teknologier, fick äran att använda sin kod för att samla in det allra första automatiserade provet, som var av en fläck av sediment från Kolumbos mineralrika havsbotten. Han utfärdade ett kommando till den autonoma manipulatorn och, ögonblick senare, en slurp-provslang fäst vid robotarmen sträckte sig ner till den exakta provplatsen och sög upp smutsen.
Billings säger att denna nivå av automatisering kommer att vara viktig för NASA när de ser på att utveckla teknologier för att utforska havsvärldar bortom vårt solsystem. "Om vi har denna storslagna vision att skicka robotar till platser som Europa och Enceladus [Jupiters och Saturnus månar, respektive], de kommer i slutändan att behöva arbeta självständigt så här och utan hjälp av en pilot, " han säger.
Går vidare, Camilli kommer att fortsätta arbeta med Billings och kollegor vid University of Michigan, samt forskare från Australian Center for Field Robotics, Massachusetts Institute of Technology, och Toyota Technological Institute i Chicago för att driva automationstekniken framåt. Arbetet kommer att innefatta utbildning av havsrobotar för att se som ROV-piloter som använder "gaze tracking"-teknik, och bygga ett robust gränssnitt på mänskligt språk så att forskare kan prata direkt med robotar utan en pilot-mellanväg.
"Vi kan så småningom se att vi har ett nätverk av kognitiva havsrobotar där det finns en delad intelligens som spänner över en hel flotta, med varje fordon som samarbetar som bin i en kupa, " säger Camilli. "Det kommer att gå långt utöver att tappa joysticken."