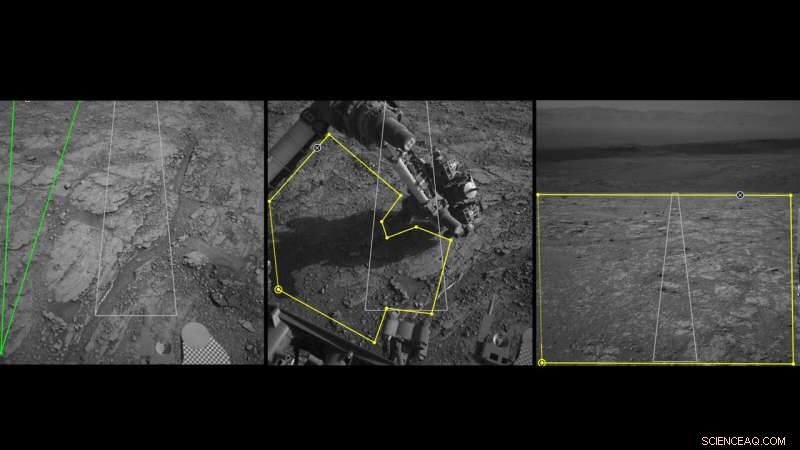
Tre bilder från verktyget AI4Mars visar olika typer av Mars-terräng som ses av NASA:s Curiosity-rover. Genom att rita gränser runt terrängegenskaper och tilldela dem en av fyra etiketter, du kan hjälpa till att träna en algoritm som automatiskt identifierar terrängtyper för Curiositys roverplanerare. Kredit:NASA/JPL-Caltech
Du kanske kan hjälpa NASA:s Curiosity-roverförare att bättre navigera på Mars. Använda onlineverktyget AI4Mars för att märka terrängegenskaper i bilder som laddats ner från den röda planeten, du kan träna en artificiell intelligensalgoritm för att automatiskt läsa av landskapet.
Är det en stor sten till vänster? Kan det vara sand? Eller så är det kanske trevligt, platt berggrund. AI4Mars, som finns på citizen science-webbplatsen Zooniverse, låter dig rita gränser runt terräng och välja en av fyra etiketter. Dessa etiketter är nyckeln till att skärpa Martian-terrängklassificeringsalgoritmen som kallas SPOC (Soil Property and Object Classification).
Utvecklad vid NASA:s Jet Propulsion Laboratory, som har hanterat alla byråns Mars-roveruppdrag, SPOC märker olika terrängtyper, skapa en visuell karta som hjälper uppdragsmedlemmar att avgöra vilka vägar de ska ta. SPOC används redan, men systemet kan behöva ytterligare utbildning.
"Vanligtvis, hundratusentals exempel behövs för att träna en djupinlärningsalgoritm, sa Hiro Ono, en AI-forskare vid JPL. "Algoritmer för självkörande bilar, till exempel, tränas med många bilder av vägar, tecken, trafikljus, fotgängare och andra fordon. Andra offentliga datauppsättningar för djupinlärning innehåller människor, djur och byggnader - men inga Mars-landskap."
Väl uppe i farten, SPOC kommer automatiskt att kunna skilja mellan sammanhängande jord, höga stenar, platt berggrund och farliga sanddyner, skicka bilder till jorden som gör det lättare att planera Curiositys nästa drag.
"I framtiden, vi hoppas att den här algoritmen kan bli tillräckligt korrekt för att utföra andra användbara uppgifter, som att förutsäga hur sannolikt en rovers hjul är att glida på olika ytor, sa Ono.
Rover-planerarnas jobb
JPL-ingenjörer som kallas roverplanerare kan ha mest nytta av en bättre utbildad SPOC. De är ansvariga för Curiositys varje rörelse, oavsett om det är att ta en selfie, rinnande pulveriserade prover in i roverns kropp för att analyseras eller köra från en plats till nästa.
Det kan ta fyra till fem timmar att träna en bilresa (vilket nu görs praktiskt taget), kräver att flera personer skriver och granskar hundratals rader kod. Uppgiften innebär ett omfattande samarbete med forskare också:Geologer bedömer terrängen för att förutsäga om Curiositys hjul kan glida, skadas av vassa stenar eller fastnar i sand, som fångade både Spirit och Opportunity rovers.
Planerare överväger också åt vilket håll rovern kommer att pekas i slutet av en körning, eftersom dess högförstärkningsantenn behöver en fri siktlinje till jorden för att ta emot kommandon. Och de försöker förutse att skuggor faller över terrängen under en bilresa, som kan störa hur Nyfikenhet bestämmer avstånd. (Rovern använder en teknik som kallas visuell odometri, jämför kamerabilder med närliggande landmärken.)
Hur AI kunde hjälpa
SPOC kommer inte att ersätta det komplicerade, tidskrävande arbete av roverplanerare. Men det kan frigöra dem att fokusera på andra aspekter av sitt jobb, som att diskutera med forskare vilka stenar som ska studeras härnäst.
"Det är vårt jobb att ta reda på hur man säkert skaffar uppdragets vetenskap, sa Stephanie Oij, en av JPL-roverplanerarna som är involverade i AI4Mars. "Automatisk generering av terrängetiketter skulle spara oss tid och hjälpa oss att bli mer produktiva."
Fördelarna med en smartare algoritm skulle sträcka sig till planerare på NASA:s nästa Mars-uppdrag, Perseverance rover, som lanseras i sommar. Men först, ett arkiv med märkta bilder behövs. Fler än 8, 000 Curiosity-bilder har laddats upp till AI4Mars-webbplatsen hittills, ger massor av foder för algoritmen. Ono hoppas kunna lägga till bilder från Spirit and Opportunity i framtiden. Sålänge, JPL-volontärer översätter webbplatsen så att deltagare som talar spanska, hindi, Japanska och flera andra språk kan också bidra.